Le ruote dell’automobile sono tra loro parallele quando si sterza?
Avviene che sono proprio la geometria e la meccanica a definire come bisogna girare le ruote dell’auto.
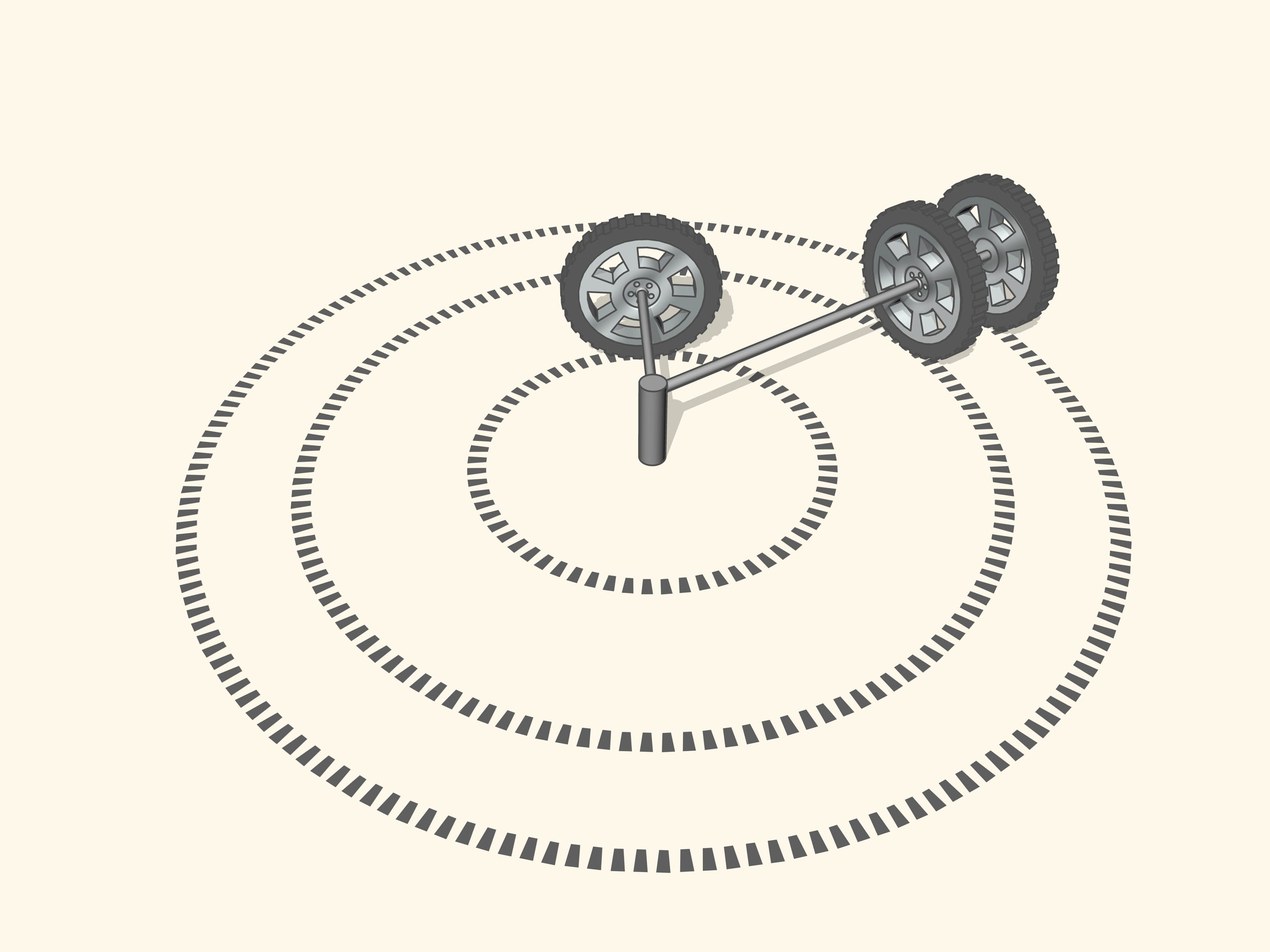
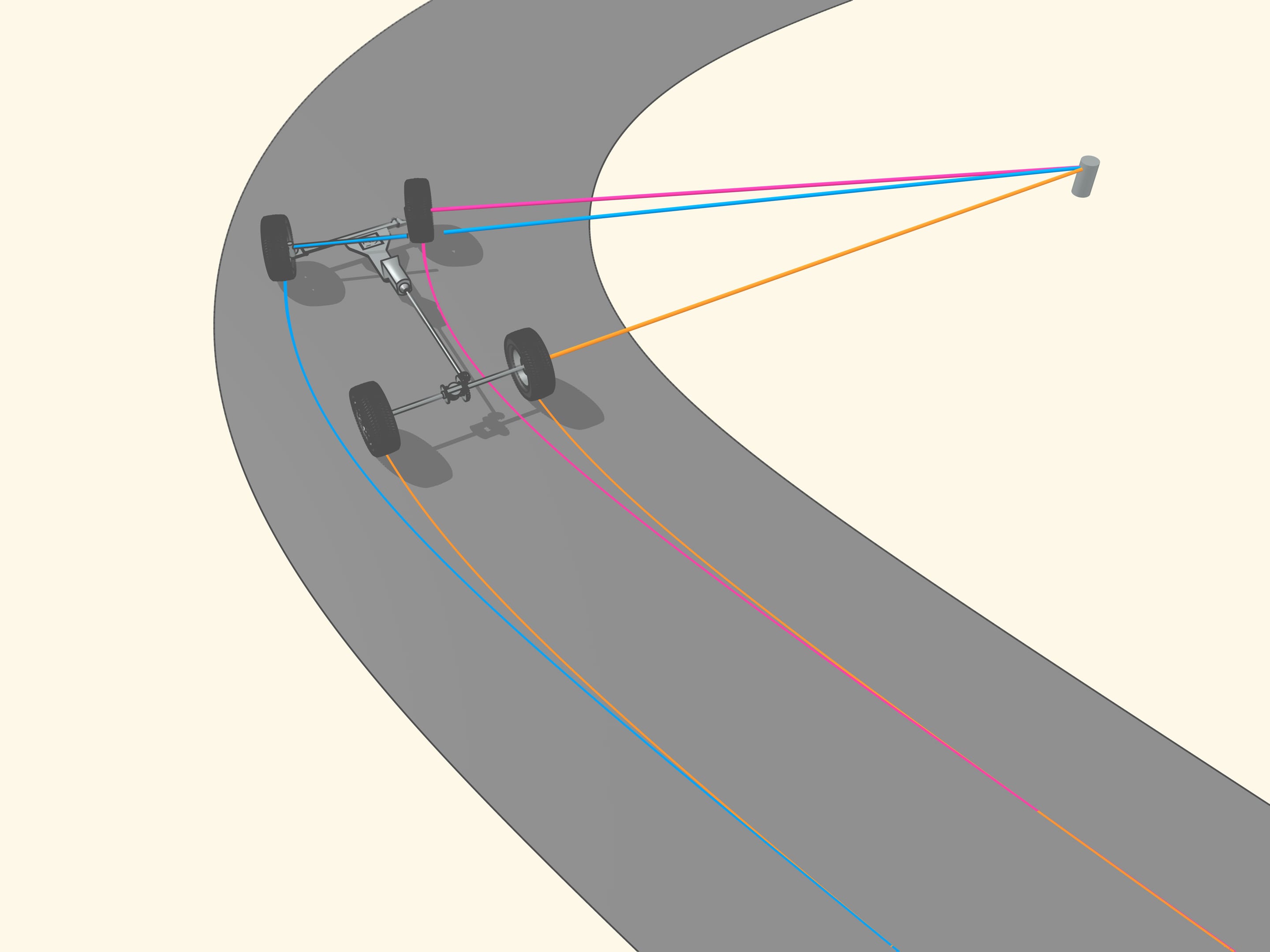
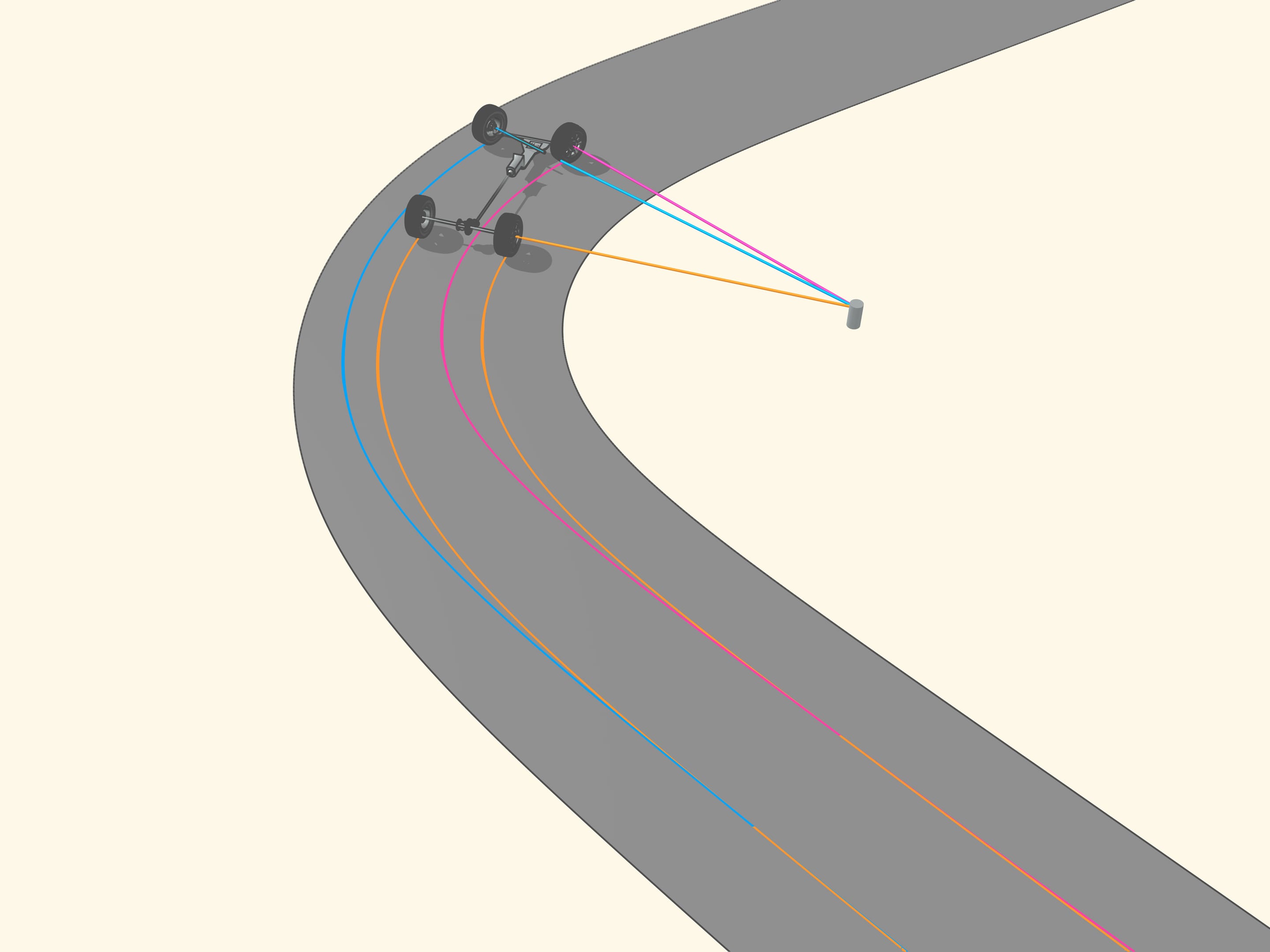
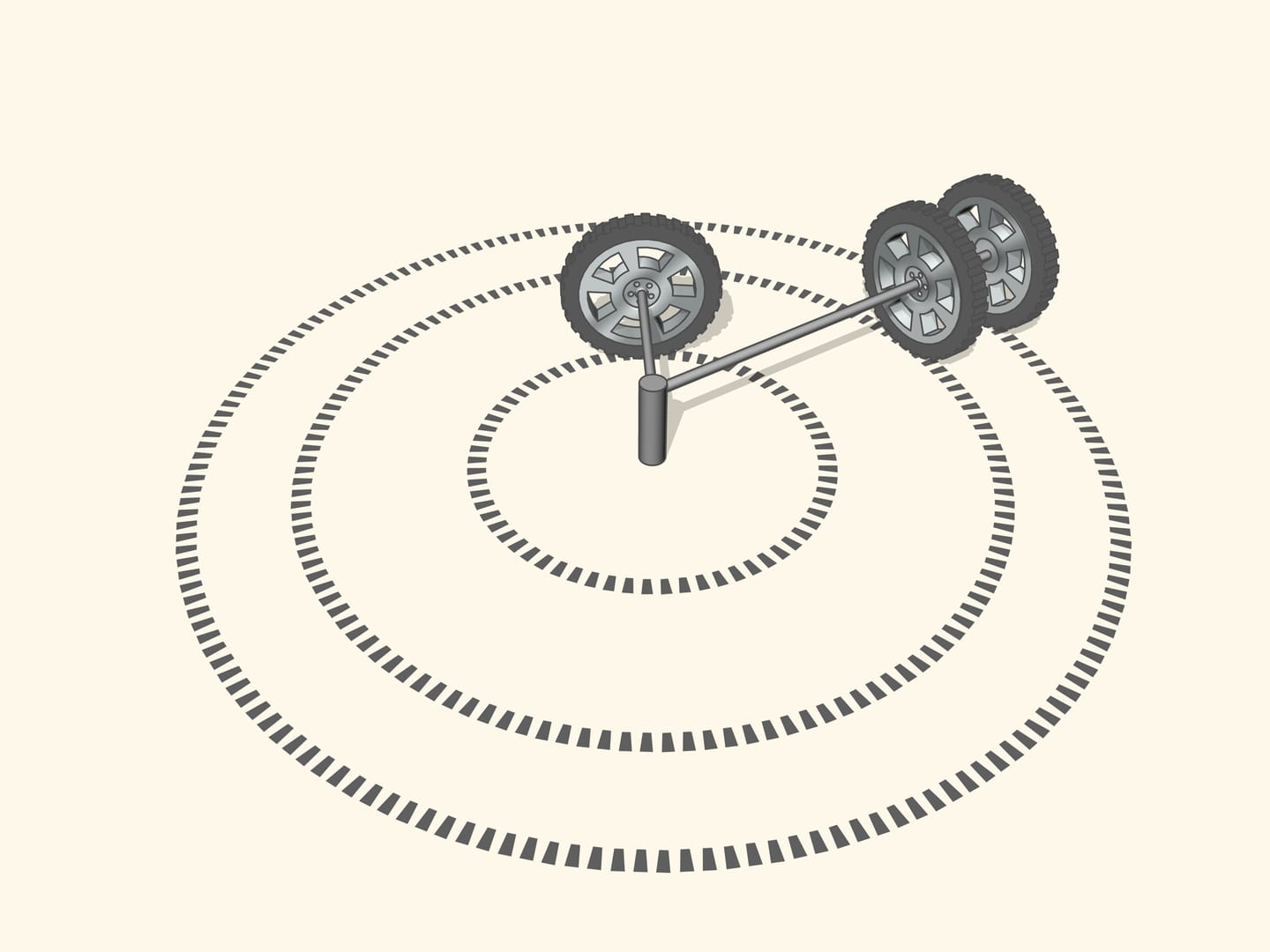
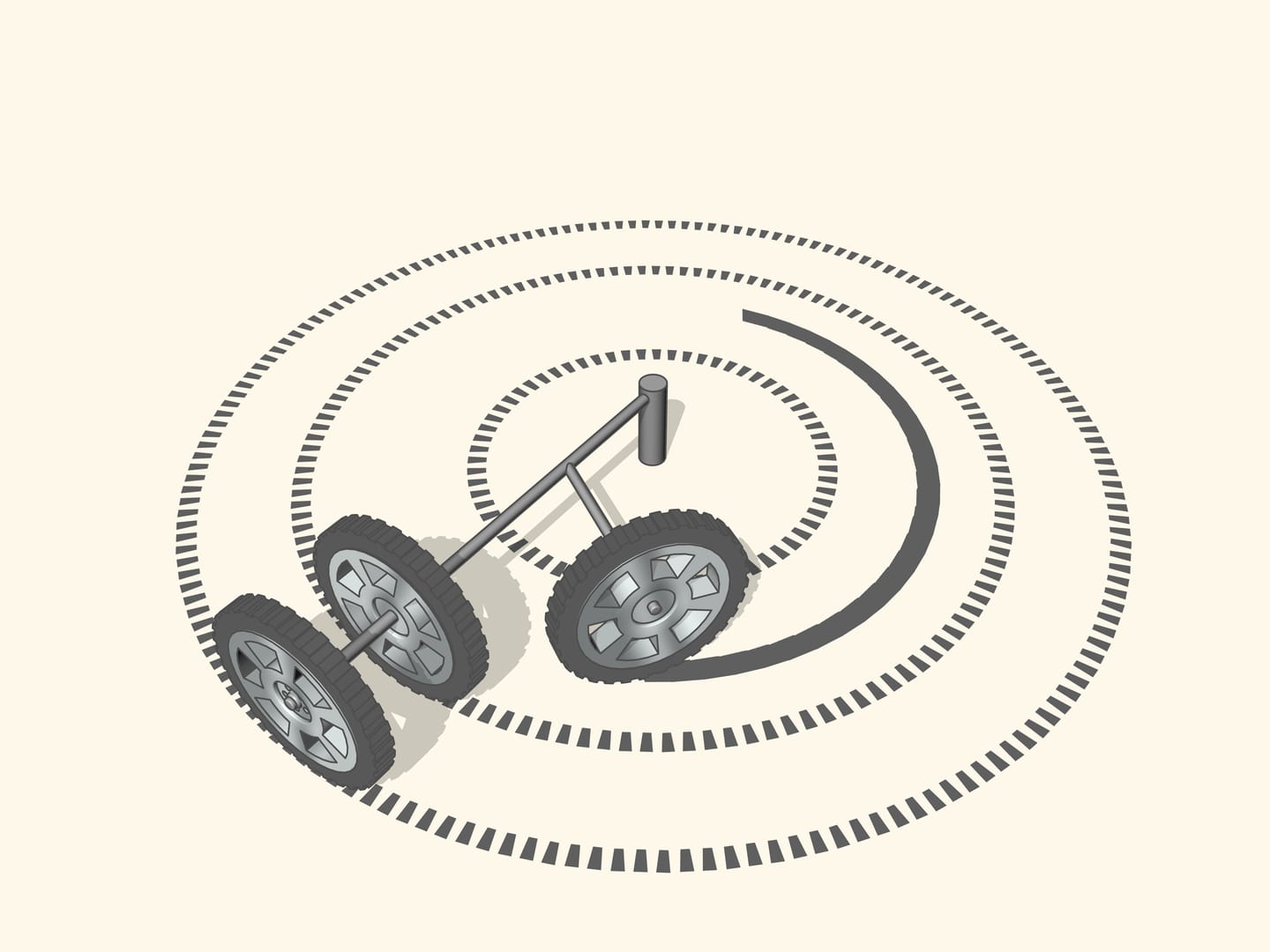
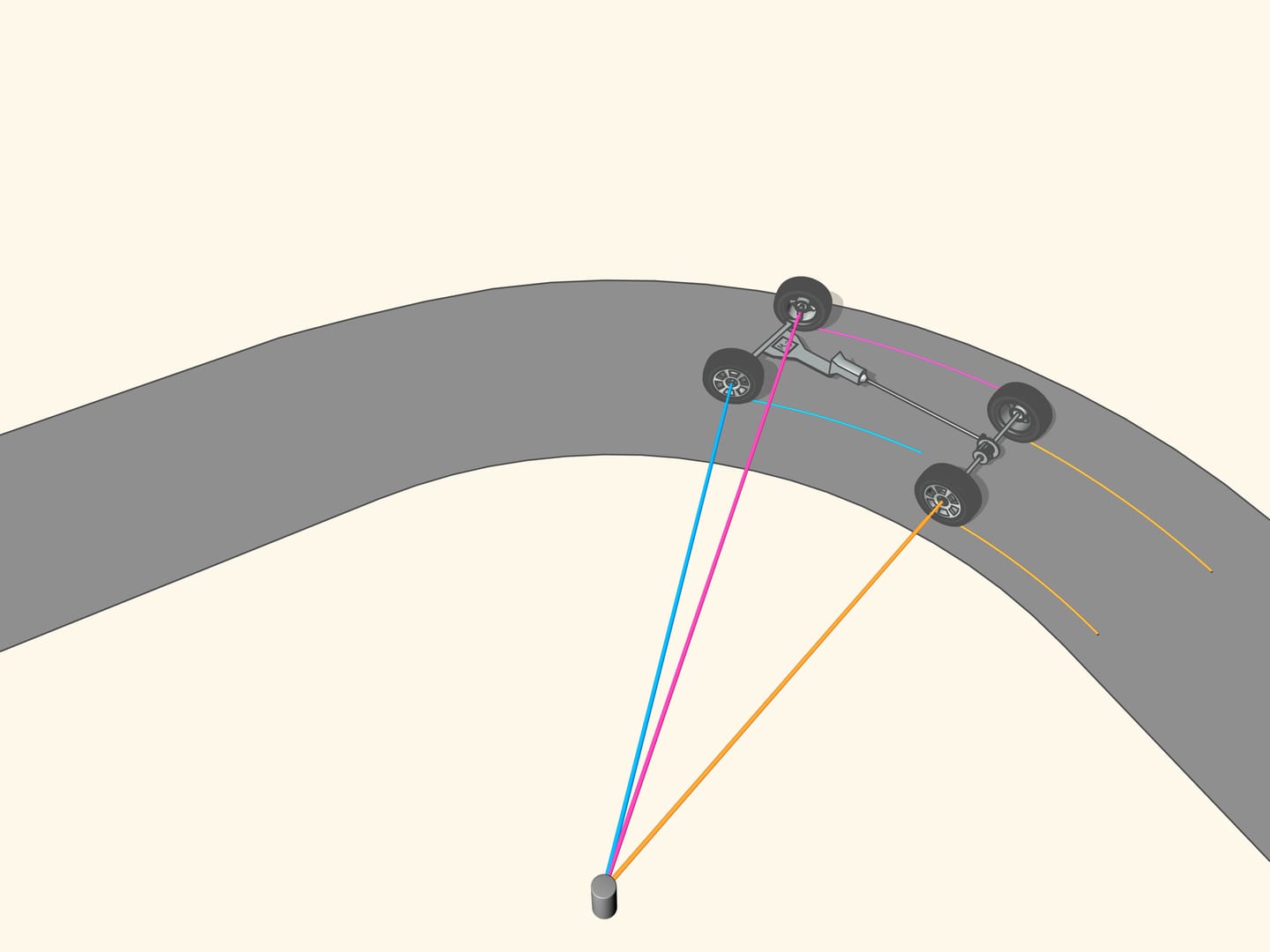
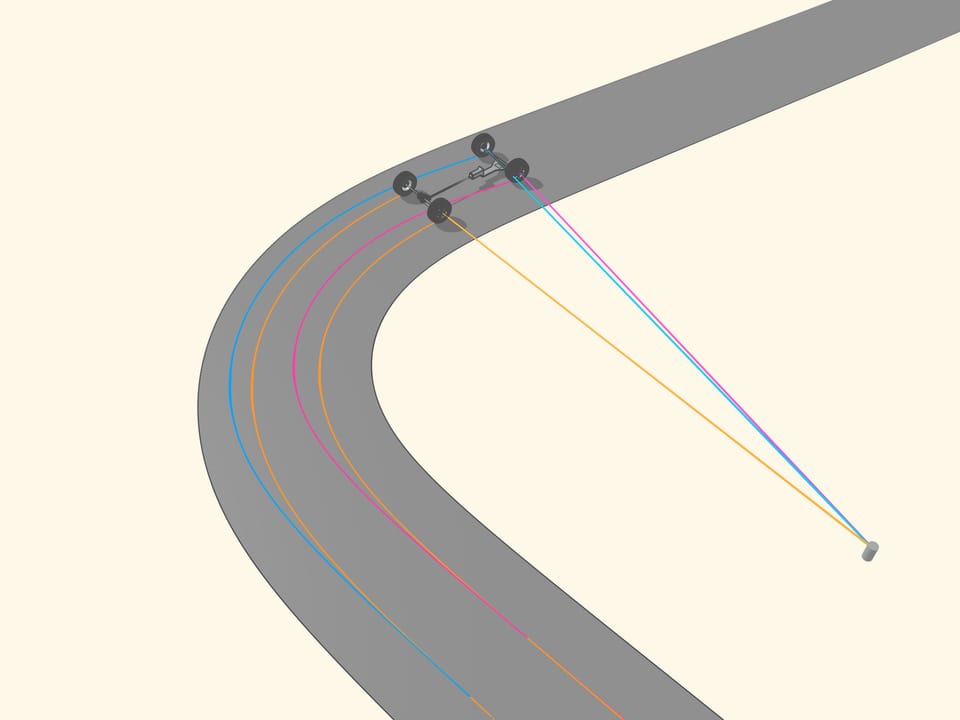
Se il prolungamento dell’asse della ruota passa per il centro della rotazione, allora la ruota rotola lasciando una traccia nitida. Четкая картинка будет, и если несколько осей направлены в центр поворота. Se invece il prolungamento non è diretto verso il centro di rotazione, allora la ruota slitta mentre gira. La traccia sarà cancellata dallo slittamento, e, soprattutto, il controllo di un mezzo di trasporto con ruote simili sarà sempre più difficile, man mano che la velocità aumenta. Sicché, per una buon controllo dell’auto, i prolungamenti degli assi delle ruote devono tutti essere diretti verso il centro di rotazione. Ma che significa questo per un’automobile a quattro ruote?
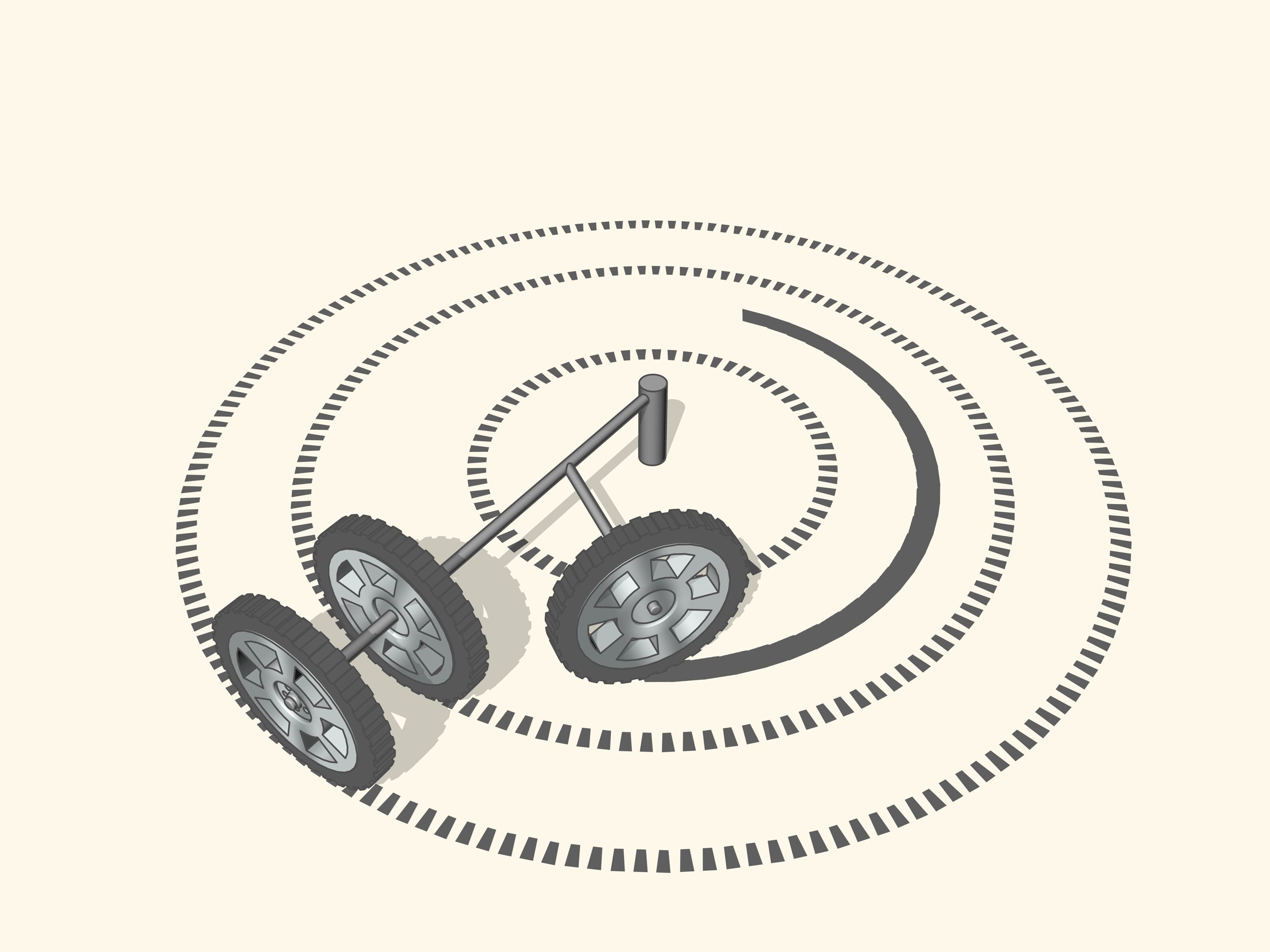
Per cominciare, impariamo a muoverci lungo una curva semplice, ossia un arco di cerchio.
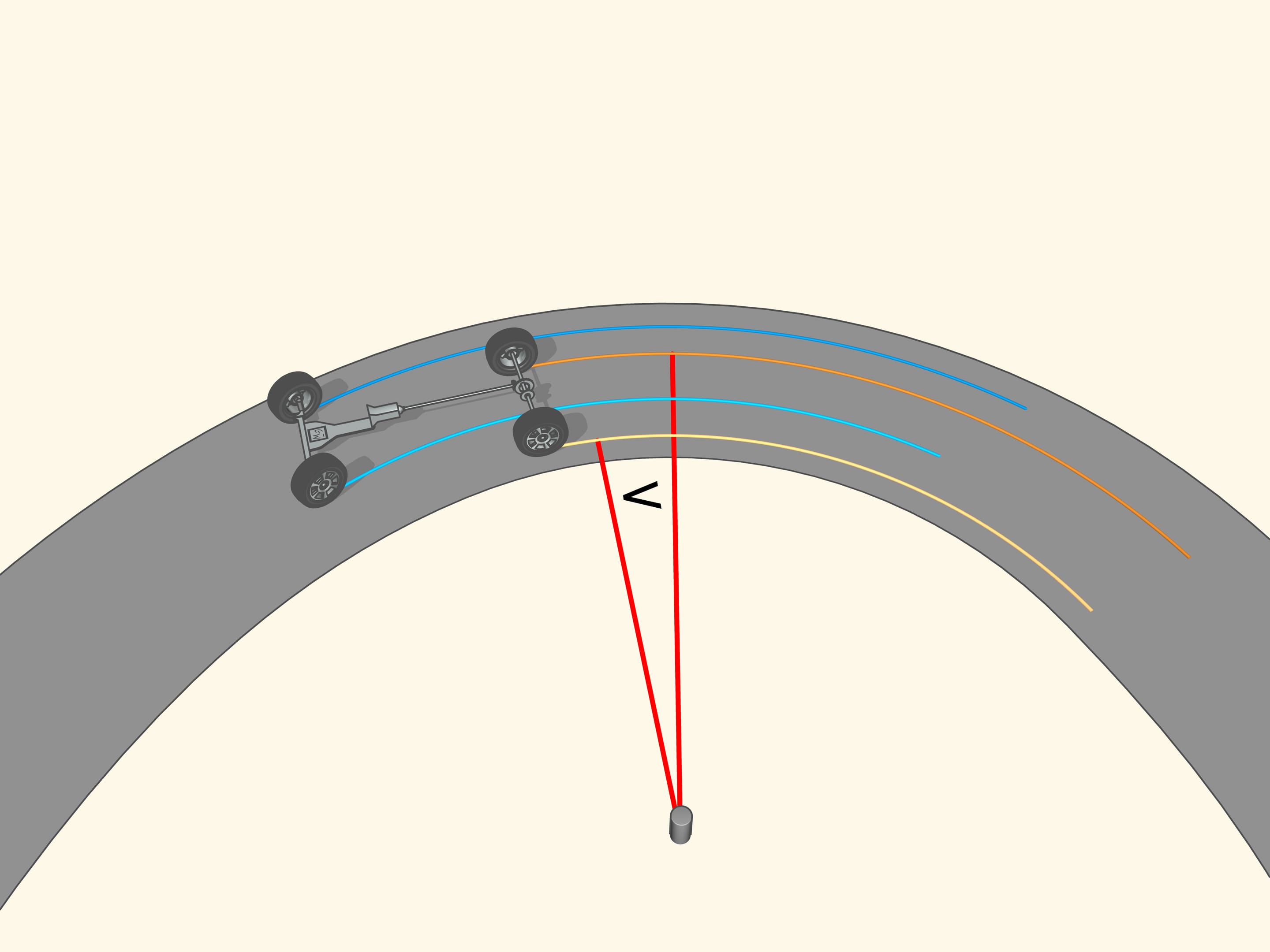
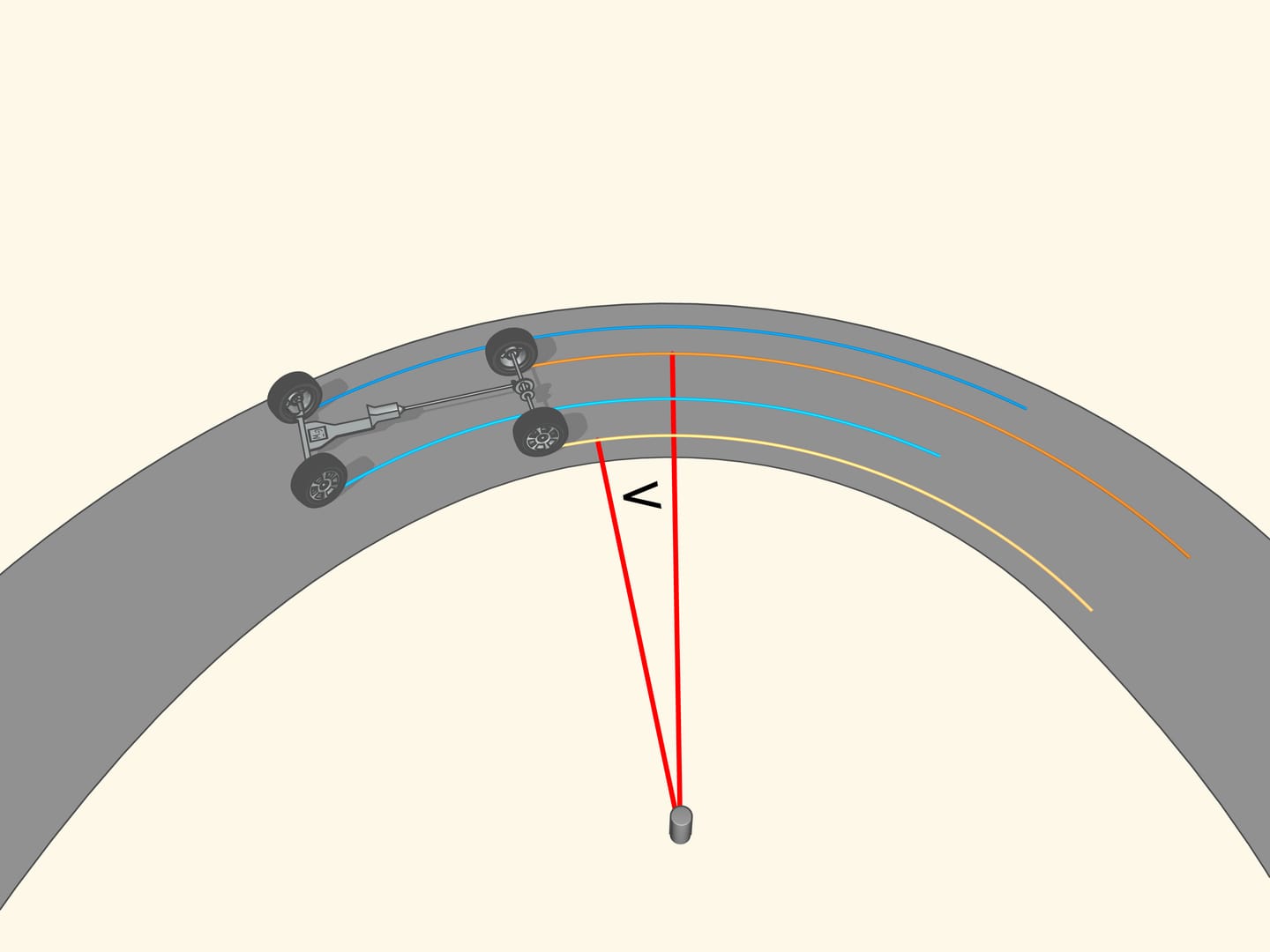
Poiché l’asse delle ruote posteriori nella maggioranza delle auto è fisso, il prolungamento dell’asse di queste ruote deve essere diretto verso il centro di questo cerchio. Le ruote anteriori vanno dunque girate in modo che l’asse di ognuna di esse sia diretto verso lo stesso centro. Questo significa che per un buon controllo bisogna poter girare le ruote anteriori di angoli diversi, sicché esse risulteranno non parallele!
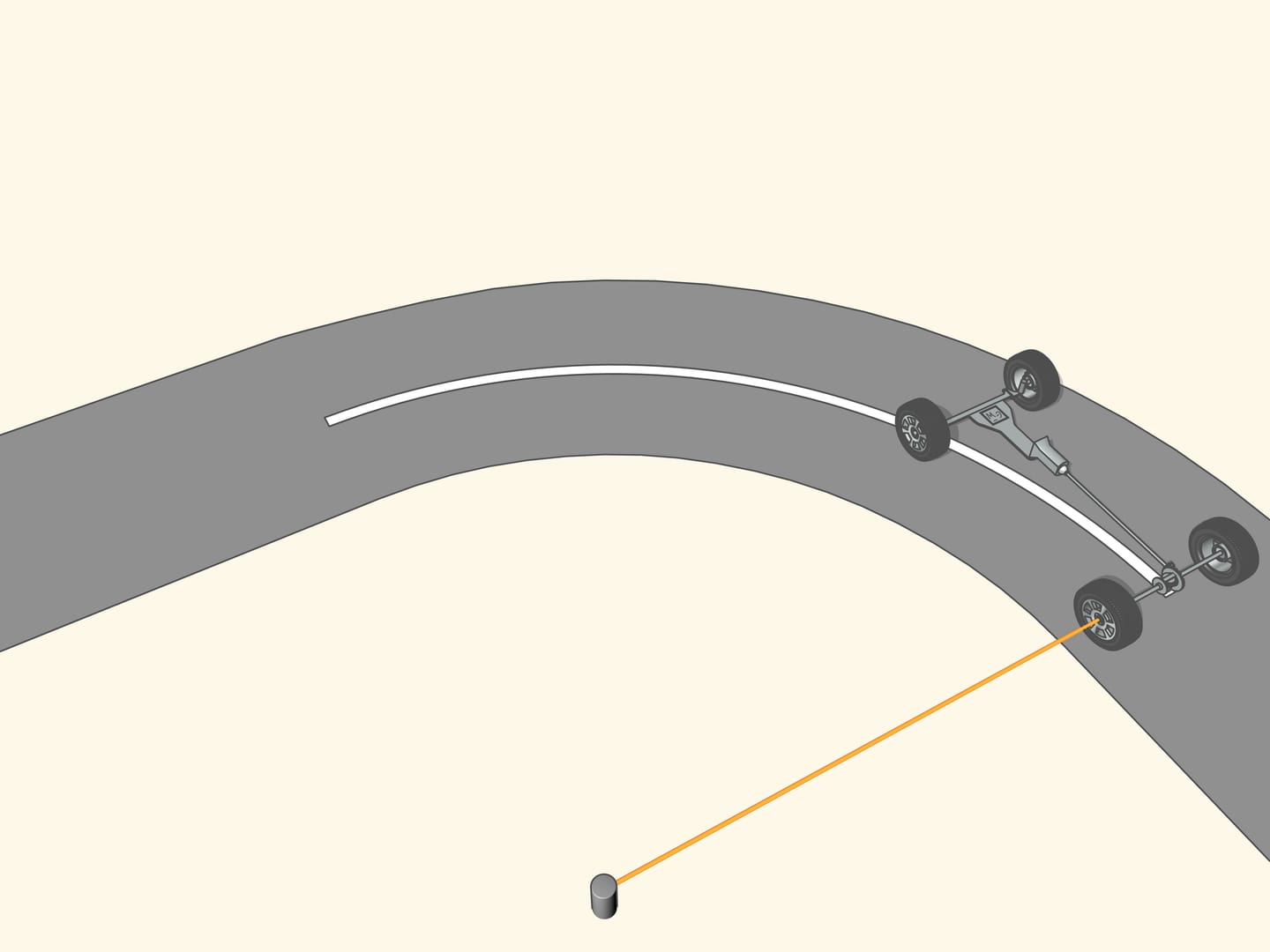
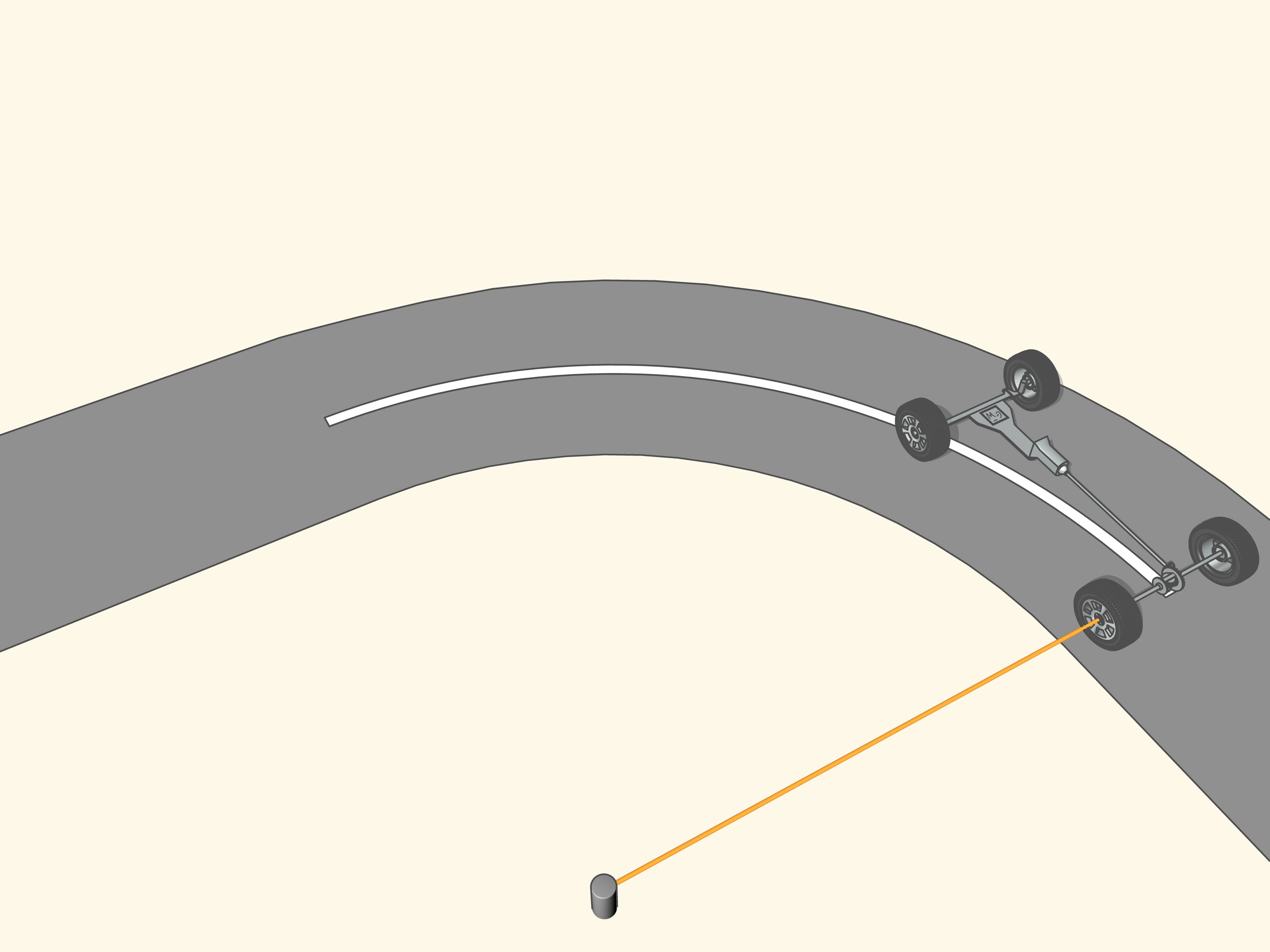
Voi direte che le curve non sono sempre archi di cerchi, e in più che l’auto non si ferma, quando deve sterzare. Questo, ovviamente, è vero, ma succede che in presenza di qualsiasi curva in ogni momento si può considerare che la macchina stia percorrendo un arco di cerchio, il cui raggio e il cui centro di pendono da quell’istante di tempo.
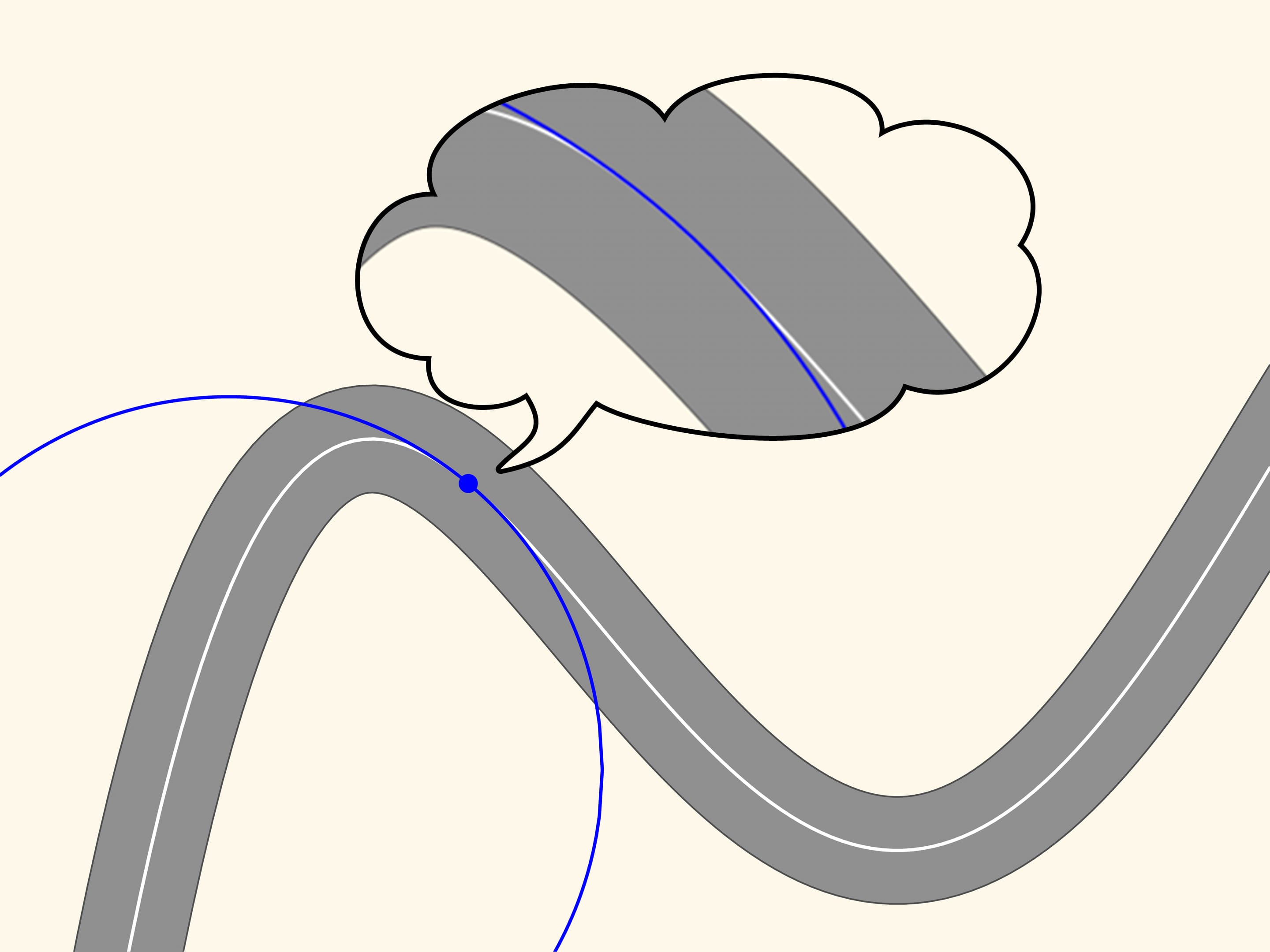
Consideriamo una strada qualunque. Affinché sia percorribile in auto, occorre che non abbia angoli acuti, ossia che la linea di mezzo sia, come si dice in matematica, una curva liscia.
Consideriamo una strada qualunque. Affinché sia percorribile in auto, occorre che non abbia angoli acuti, ossia che la linea di mezzo sia, come si dice in matematica, una curva liscia.
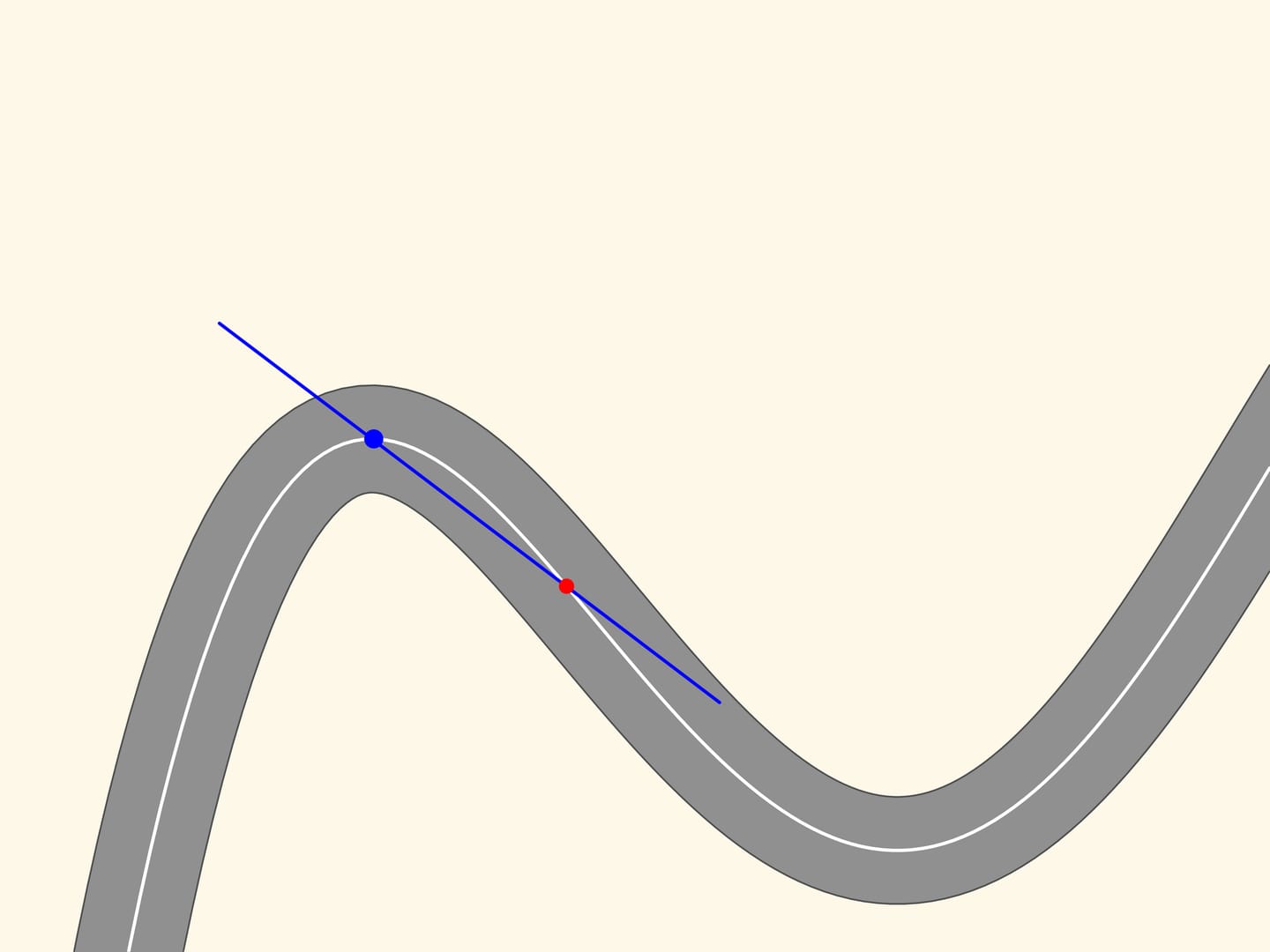
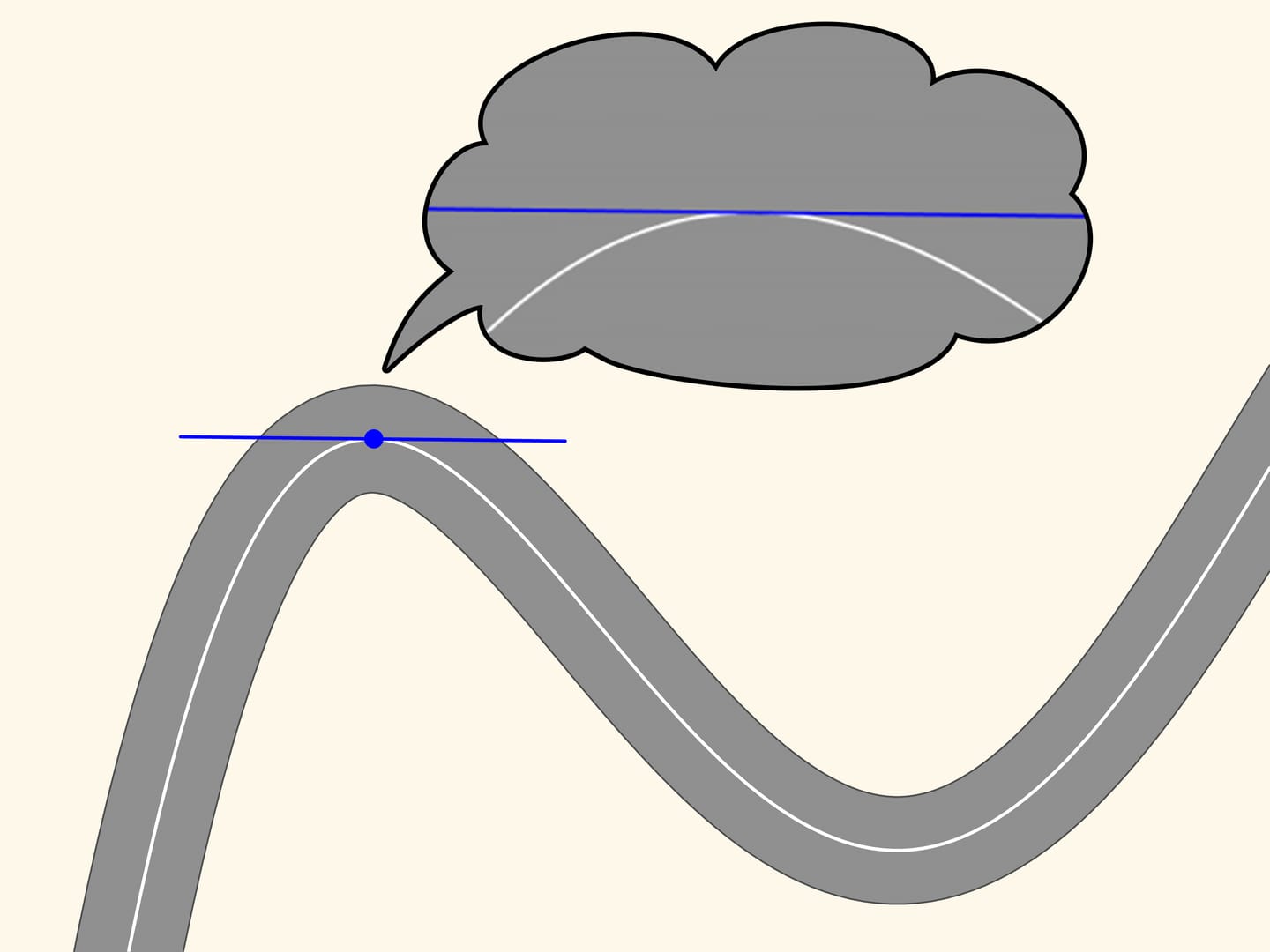
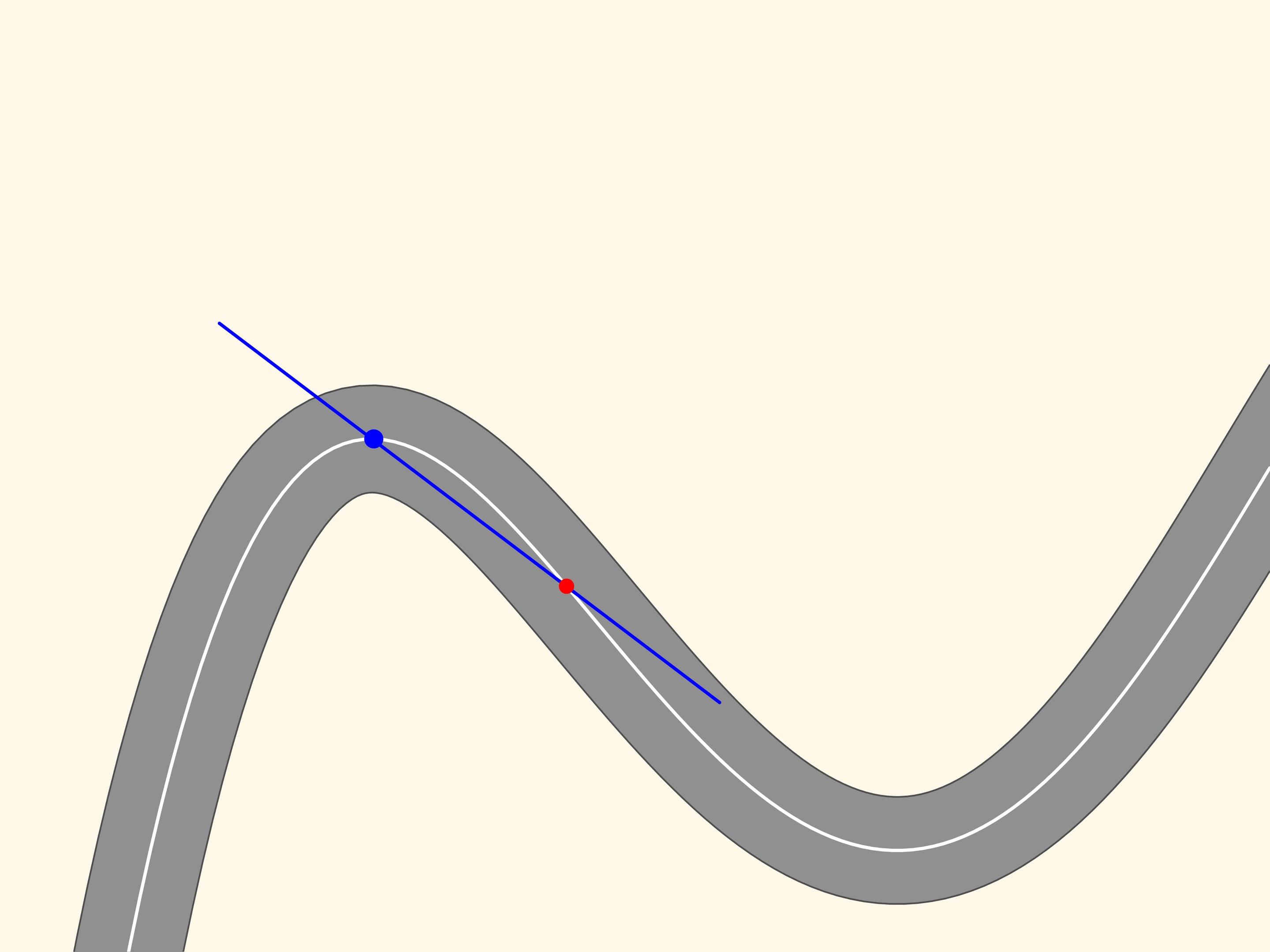
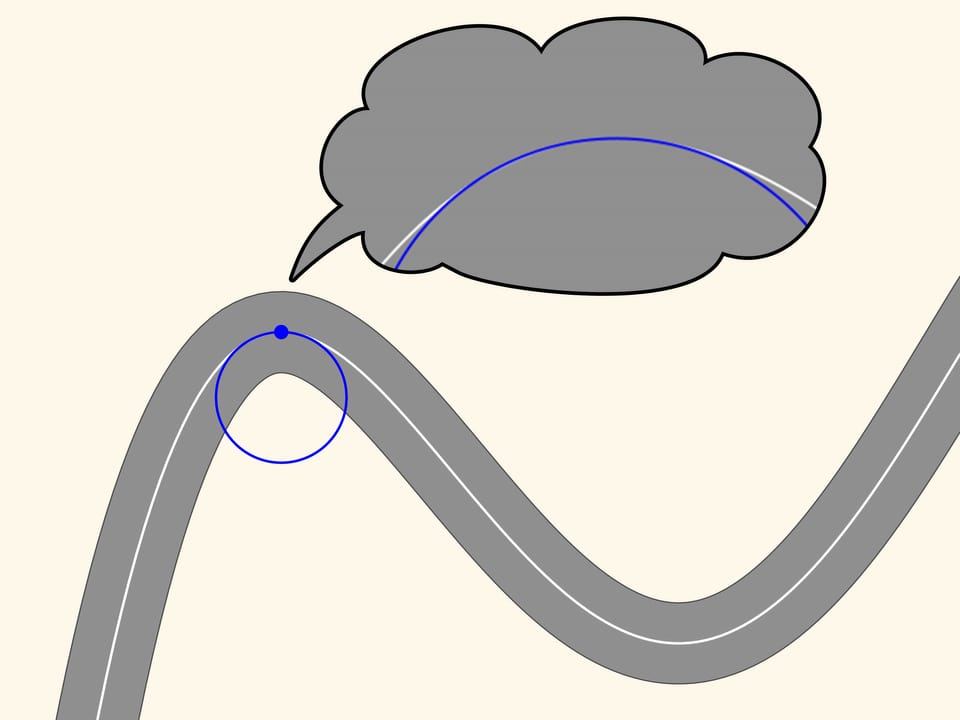
Prendiamo un punto qualsiasi di questa linea e marchiamolo in rosso, ed un altro, un po’ distante dal primo, marcato in blu. Questi due punti sul piano definiscono un’unica linea retta che li congiunge, retta che noi tracciamo. Ora muoviamo il punto rosso lungo la curva verso il punto blu. Nel momento in cui i punti coincidono, la retta da essi definita diventerà la retta tangente. Essa costituisce l’approssimazione lineare della curva in un piccolo intorno del punto. Osserviamo tuttavia nell’ingrandimento che la curva e la retta sono vicine solo per un piccolo tratto.
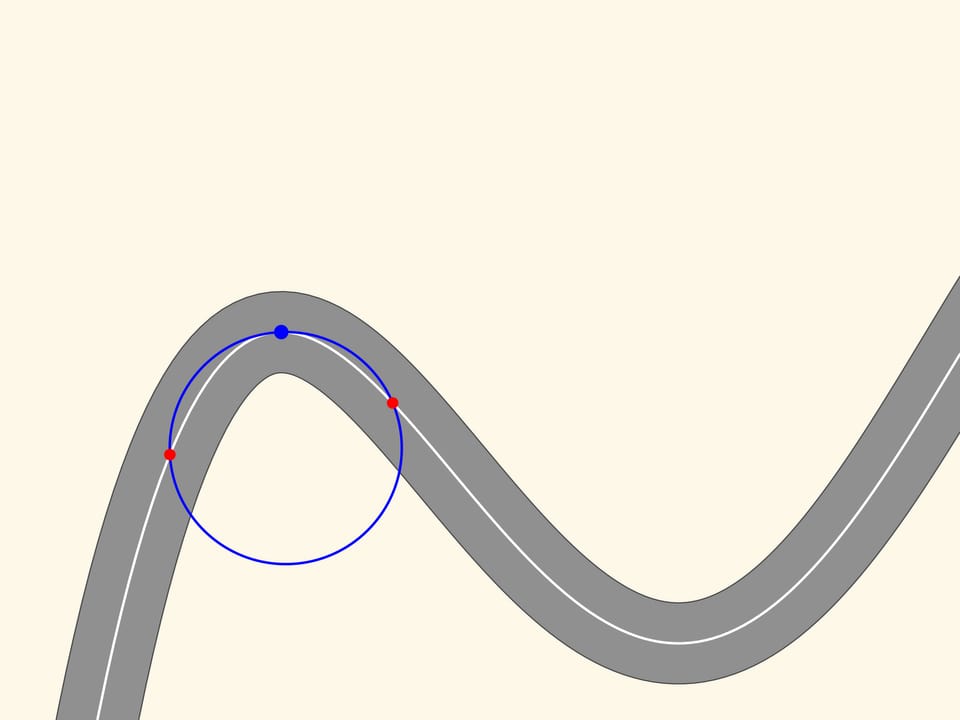
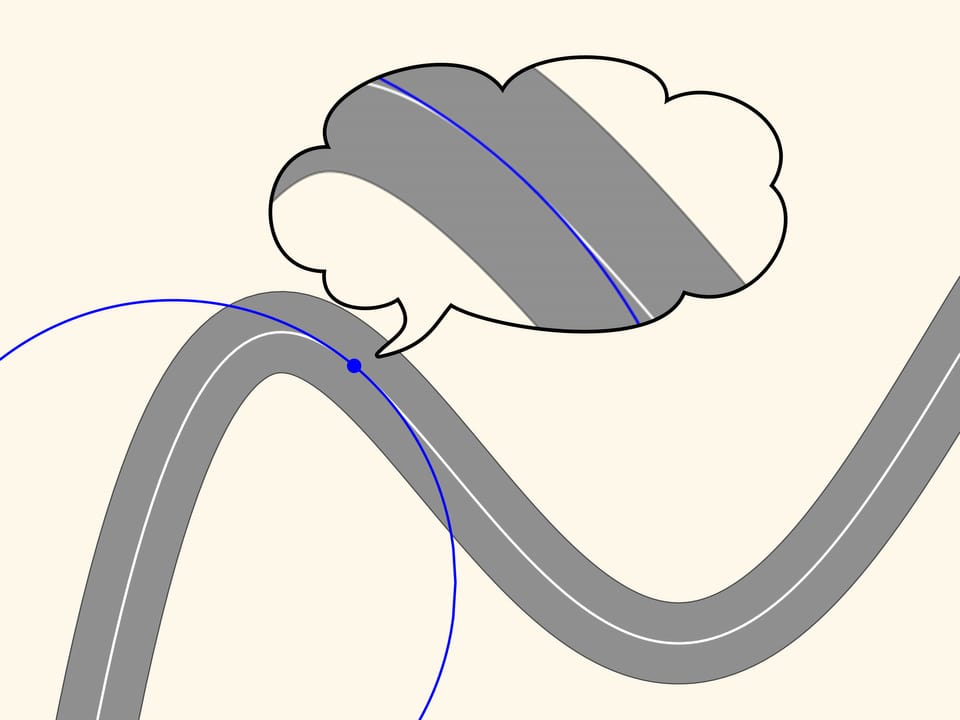
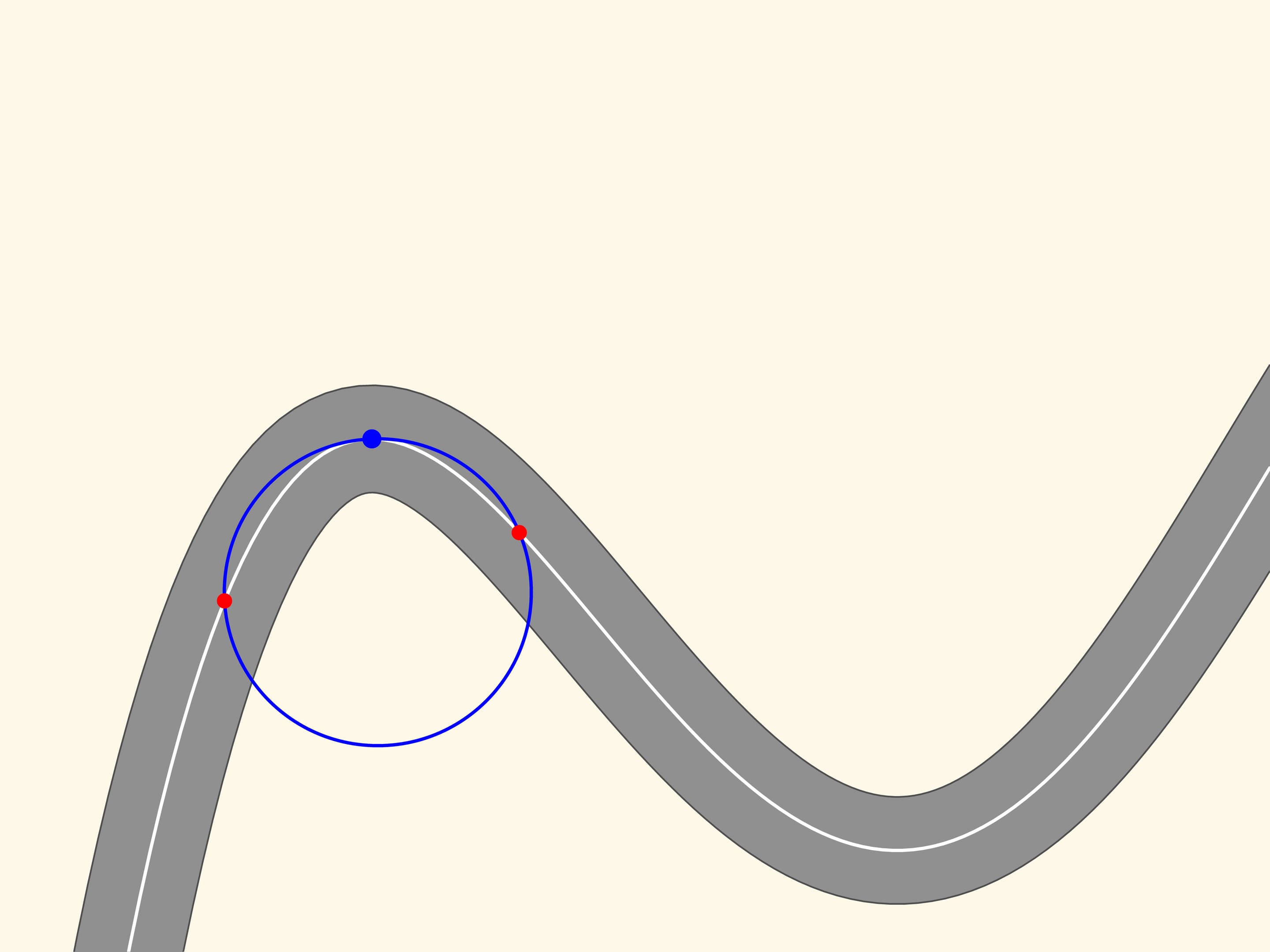
Prendiamo ora sulla curva due punti rossi, uno a destra e l’altro a sinistra del punto blu. Tre punti che non stanno su di una linea retta definiscono un solo cerchio, cerchio che noi tracciamo. Muoveremo ora i due punti rossi verso il punto blu. Nel momento in cui essi coincidono, otteniamo un cerchio, che viene detto osculatore. Esso costituisce un’approssimazione al secondo ordine della curva, e nell’ingrandimento si vede quanto questa approssimazione sia migliore. Osserviamo che in un tratto di curva, lungo il quale il raggio del cerchio osculatore cresce o diminuisce (come nei tratti in salita e in discesa della curva nella figura) il cerchio osculatore interseca sempre la curva, a differenza della tangente, che è situata, nelle vicinanze del punto di tangenza, nella stessa parte di piano, rispetto alla curva.
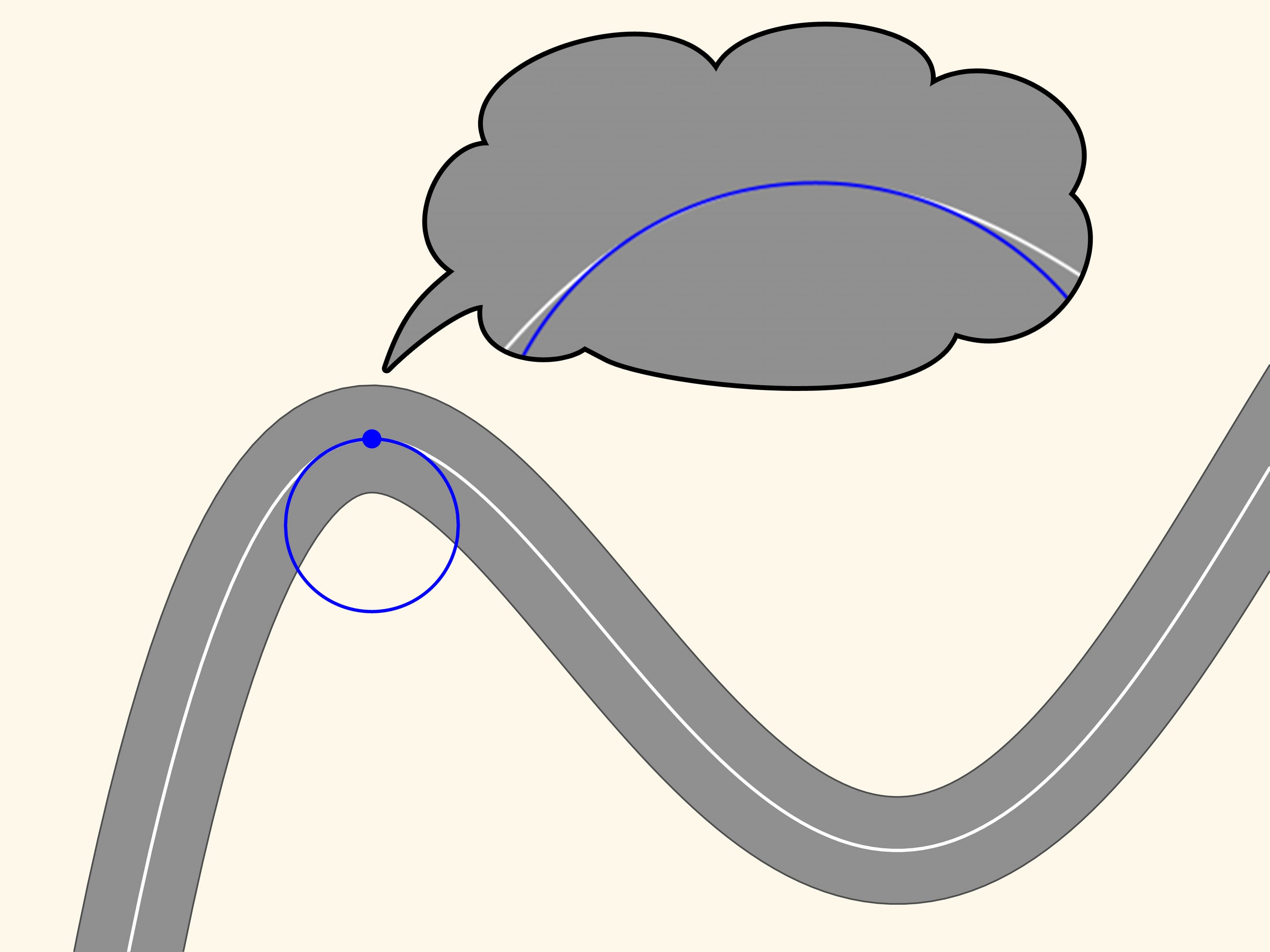
Siccome il cerchio osculatore nel nostro caso approssima bene la curva e può essere costruito in ogni punto, il moto per una strada con curve si può considerare in ogni istante di tempo come il moto lungo un arco del cerchio osculatore. Il raggio e il centro di questo cerchio dipendono, ovviamente, dal punto in cui si trova l’auto.
A questo modo, durante lo spostamento lungo una certa curva, si può pensare che in ogni istante la macchina si muove su un piccolo arco di un certo cerchio. E il nostro primo caso, in cui la strada è un arco di cerchio, è dunque fondamentale per studiare il movimento.
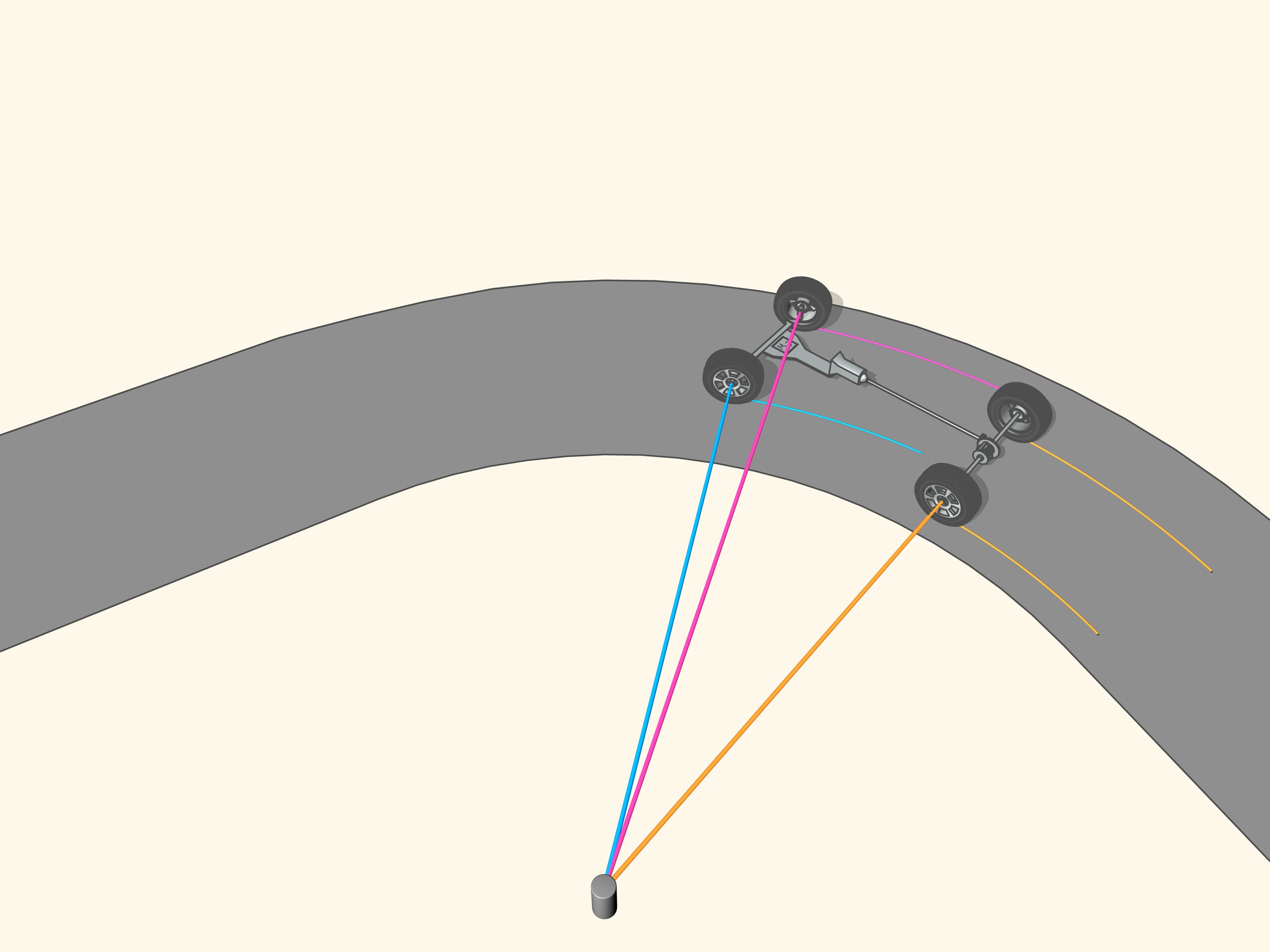
Ma in che modo ottenere che per qualsiasi posizione dello sterzo il prolungamento degli assi delle ruote sia diretto verso il centro istantaneo di curvatura (ossia il centro del cerchio osculatore corrispondente)?
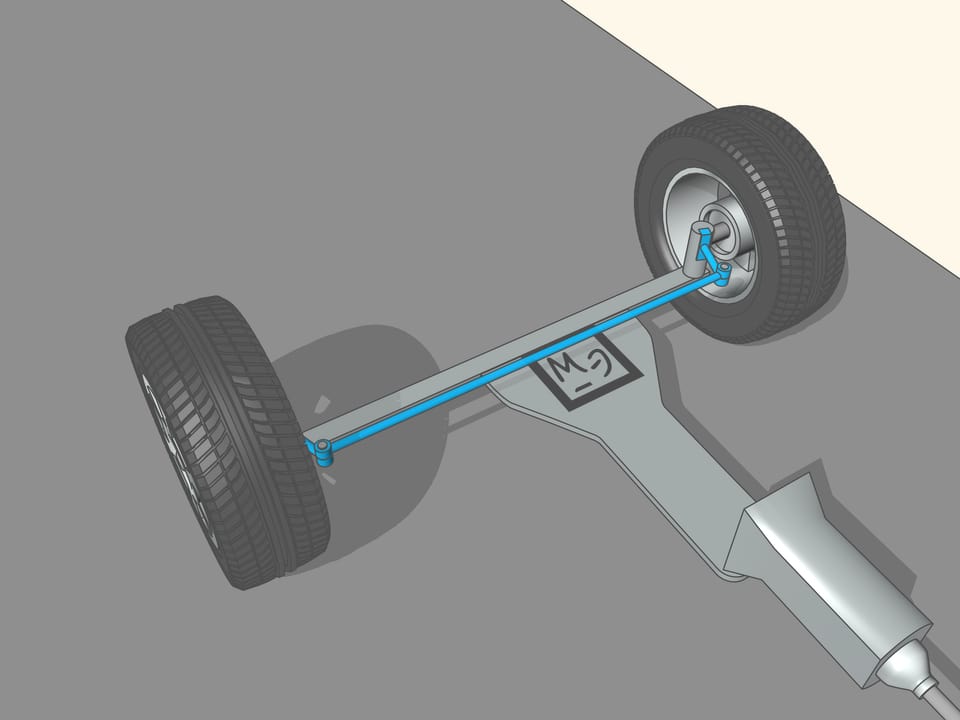
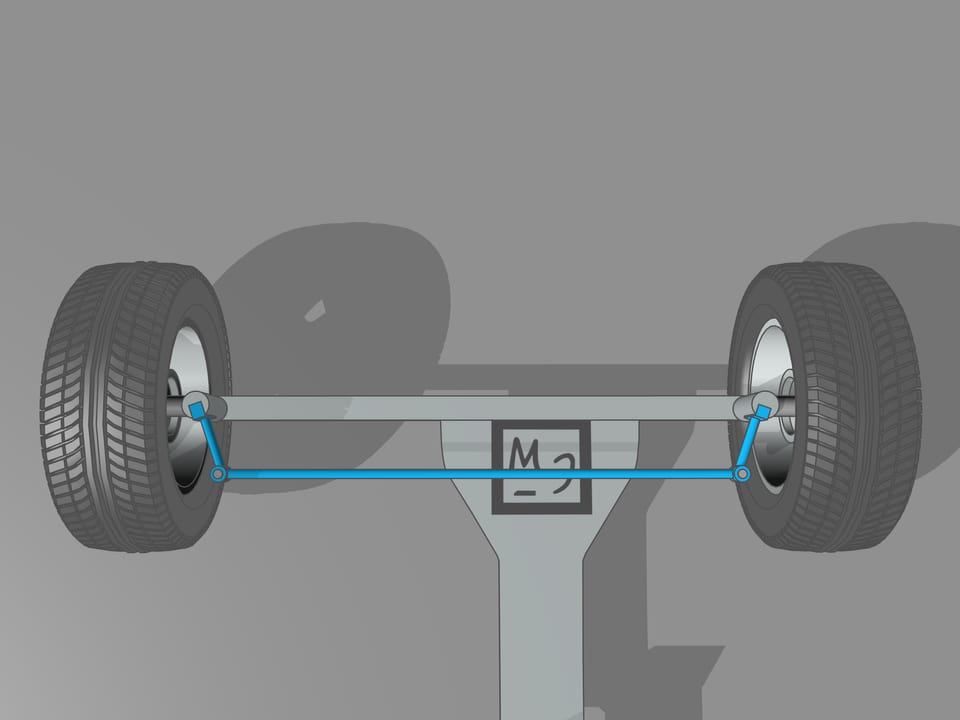
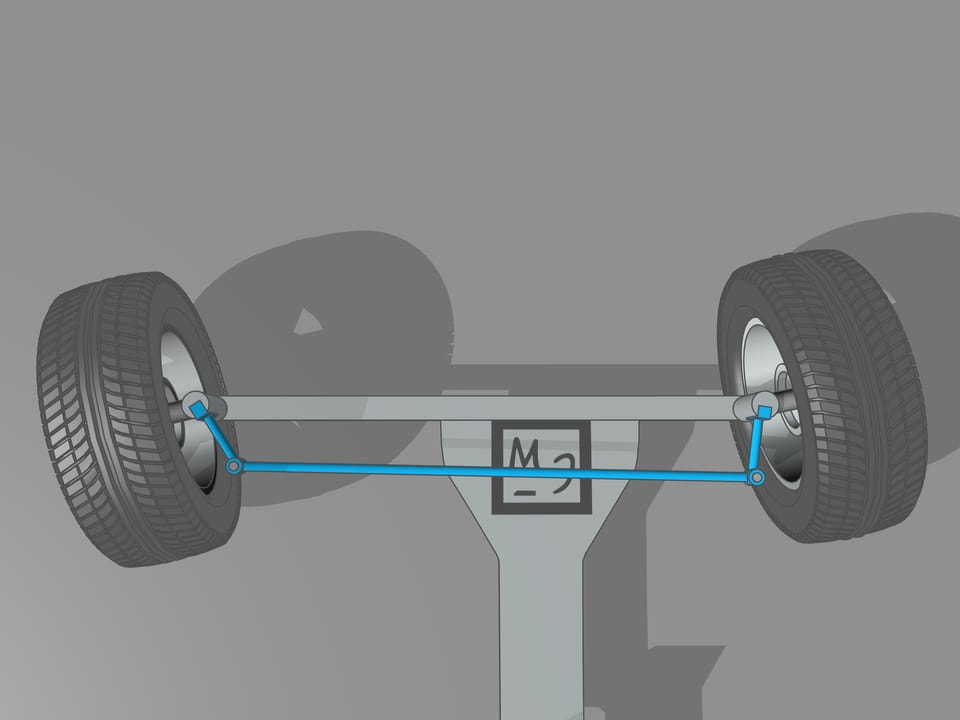
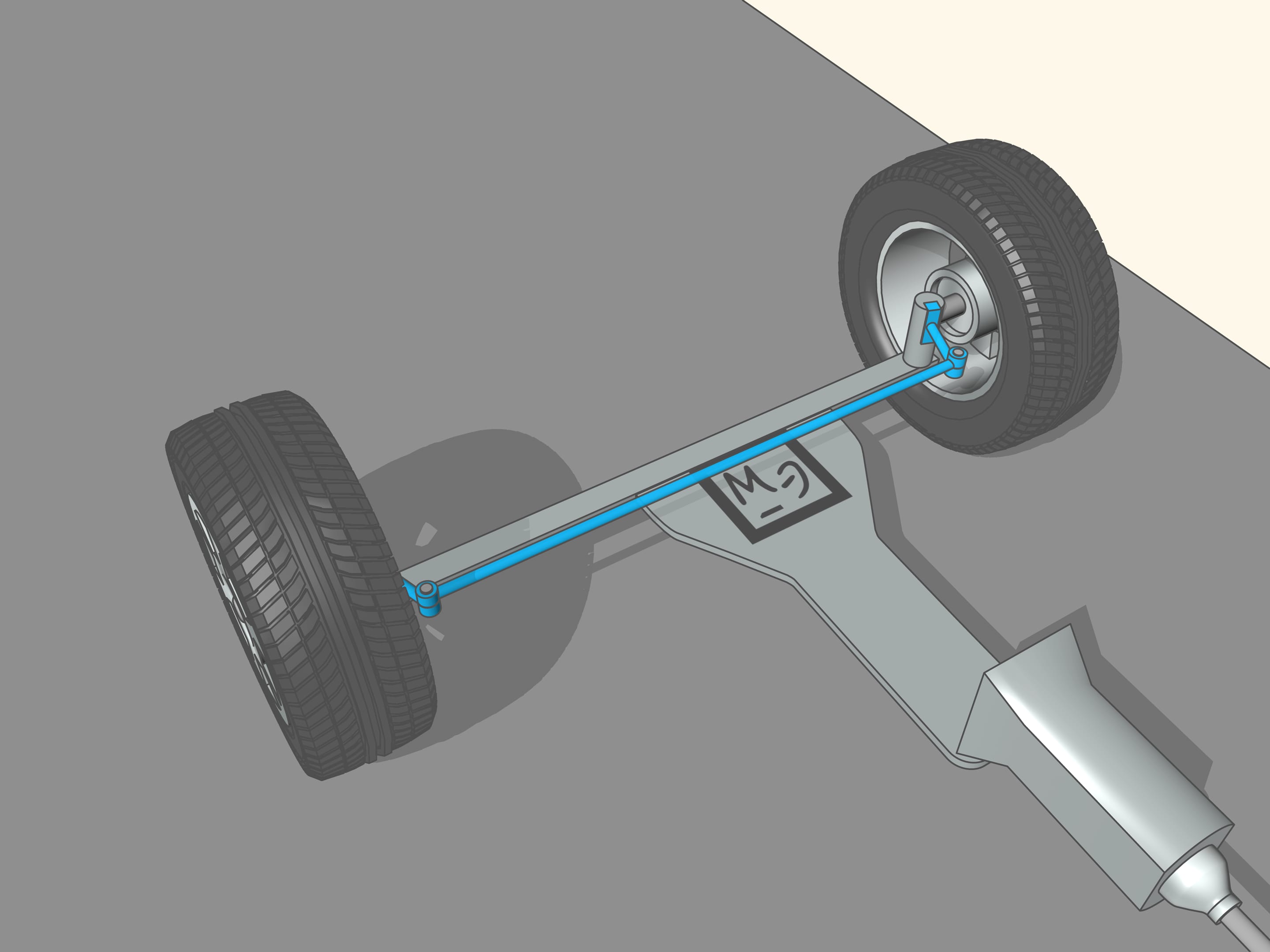
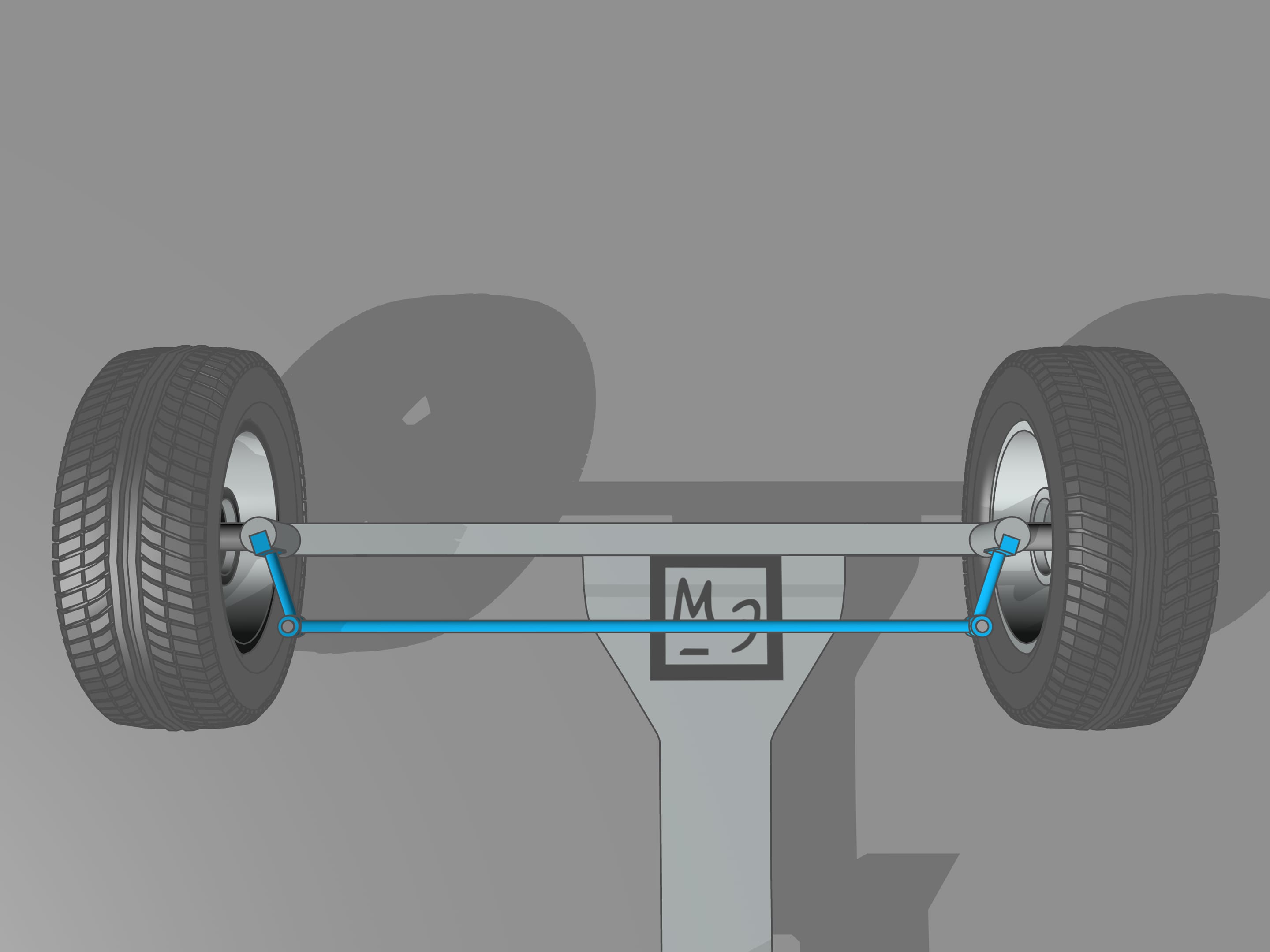
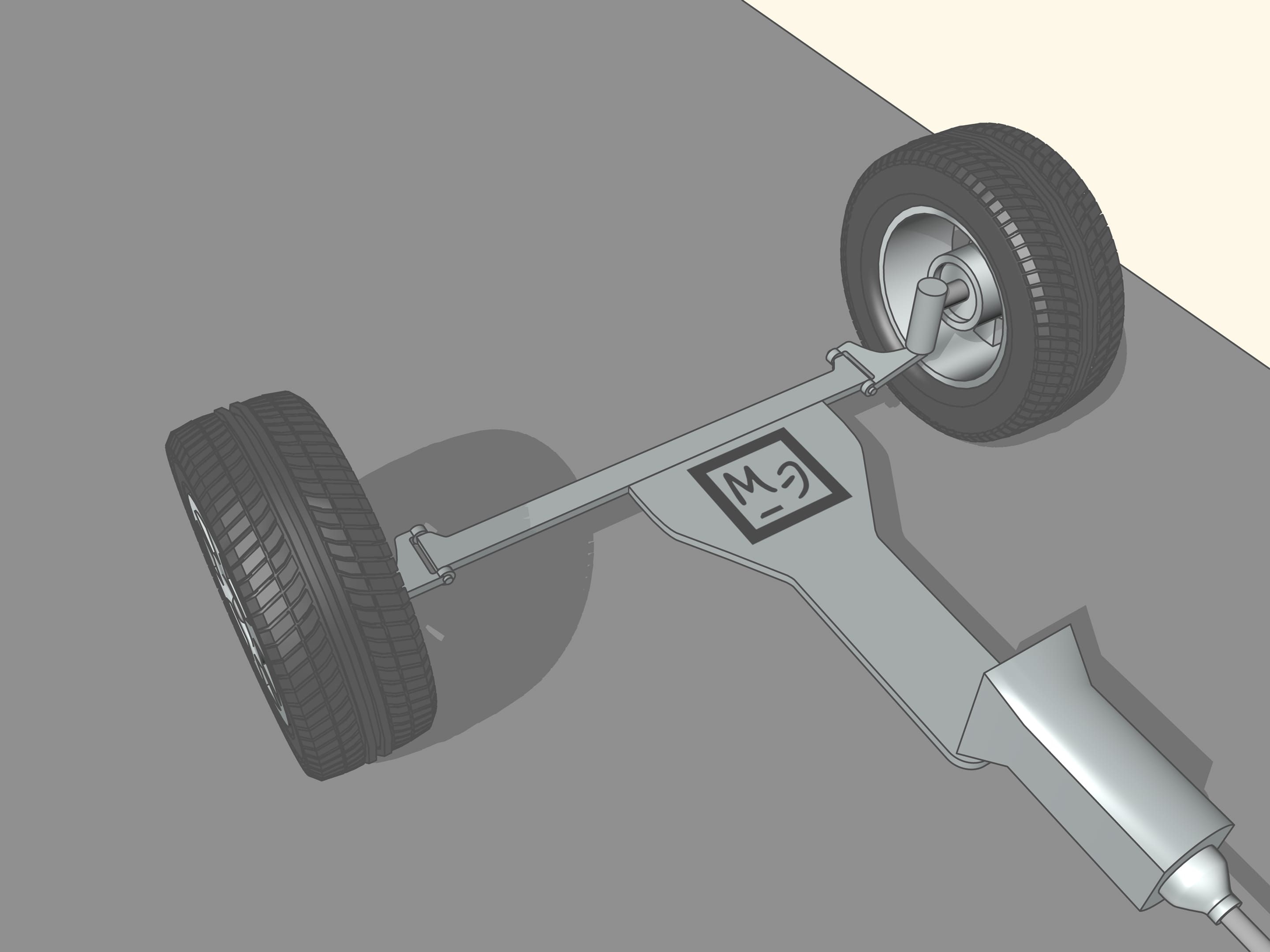
Avviene che anche qui viene in nostro aiuto la geometria, e precisamente col trapezio isoscele, che conosciamo dai tempi della scuola: un quadrilatero con due lati paralleli, dette basi, e due altri lati non paralleli tra loro uguali. Se si scelgono correttamente le lunghezze dei lati del trapezio, si ottengono le condizioni necessarie per il controllo ottimale: i prolungamenti degli assi delle ruote anteriori si intersecano in un punto situato sul prolungamento dell’asse delle ruote posteriori. E questo punto è il centro istantaneo di curvatura.
Fu un maestro artigiano francese, Charles Jeantland, a inventare tale sistema di controllo delle ruote anteriori dei carri. Ma per i carri, che si muovono a basse velocità, questa invenzione non era così essenziale, come per le automobili, e fu dimenticata. Soltanto dopo tre quarti di secolo due ingegneri tedeschi, due padri delle case automobilistiche, Gottlieb Wilhelm Daimler e Karl Friedrich Michael Benz, costruendo le loro automobili, tornarono al trapezio di Jeantland. Nell’anno 1889 Daimler ottenne il brevetto per il suo “metodo del controllo indipendente delle ruote anteriori con diversi raggi di curvatura”. E nel1893 Benz ottenne il brevetto per la sua “costruzione di un sistema di controllo con cerchi di controllo tangenti alle ruote”. Dopo aver risolto il problema del controllo delle ruote sterzanti anteriori e altre importanti questioni tecniche, Karl Benz costruì la sua famosa automobile a quattro ruote indipendenti “Viktoria”.
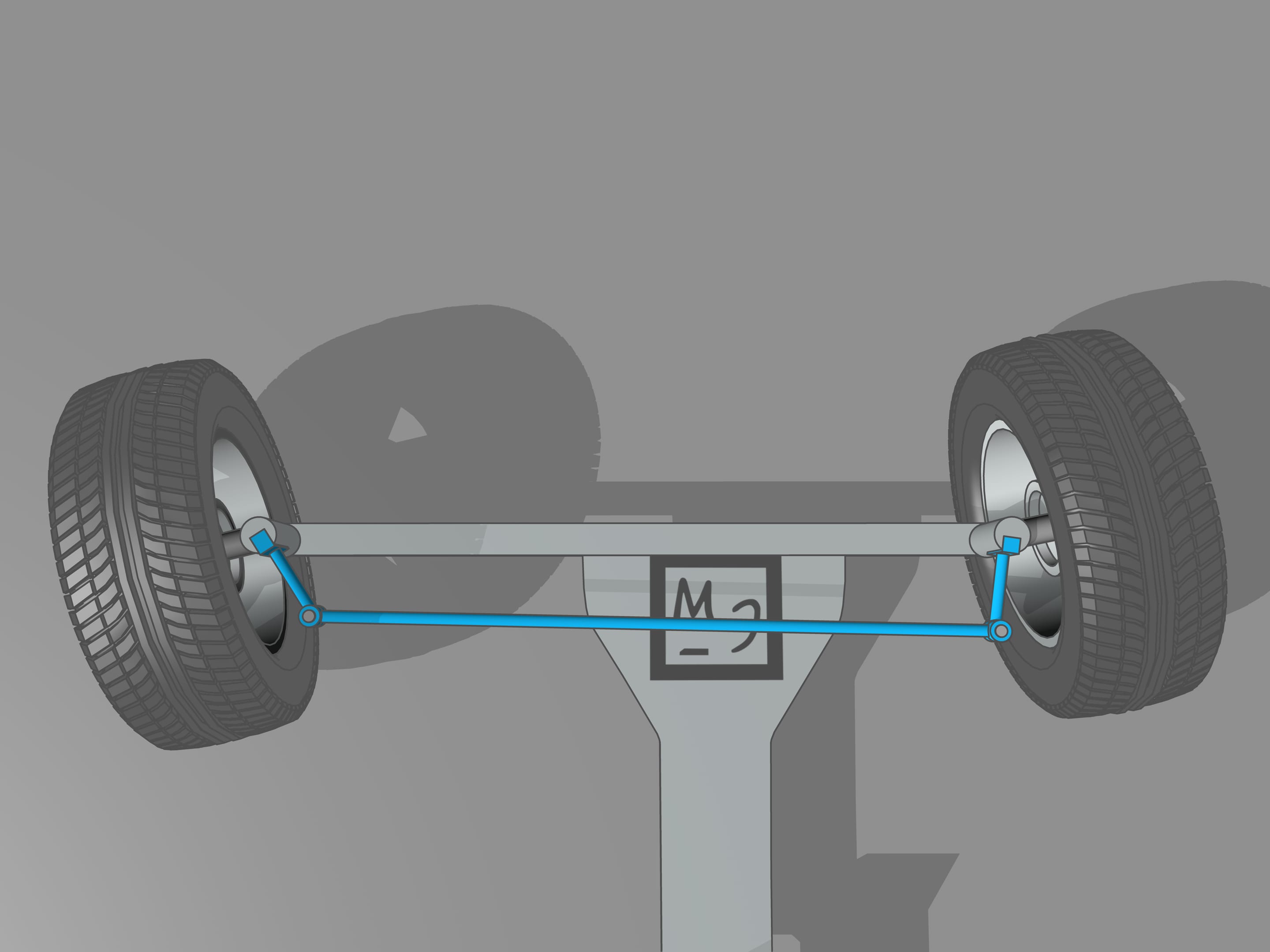
Dal punto di vista matematico, il trapezio non permette di realizzare le condizioni necessarie affinché i prolungamenti degli assi delle ruote anteriori si intersechino sempre in un punto situato sul prolungamento dell’asse delle ruote posteriori. Usando il trapezio, questo punto si troverà sempre spostato un pochino rispetto alla retta dell’asse posteriore. Ma perché allora abbiamo così a lungo parlato del trapezio, chiederete? Ci siamo preoccupati troppo presto: semplicemente non dobbiamo applicare il rigore matematico ai problemi tecnici senza usare il buon senso. Affinché i prolungamenti degli assi delle ruote anteriori si intersechino sempre in un punto situato sul prolungamento dell’asse delle ruote posteriori è necessario che la lunghezza della base minore del trapezio cambi un poco. Per la lunghezza usuale di questa base, che è superiore a un metro, i cambiamenti necessari della lunghezza consisterebbero in tutto di un centimetro, che è inferiore agli interstizi tra le giunzioni e alla tolleranza ammessa nella fabbricazione.
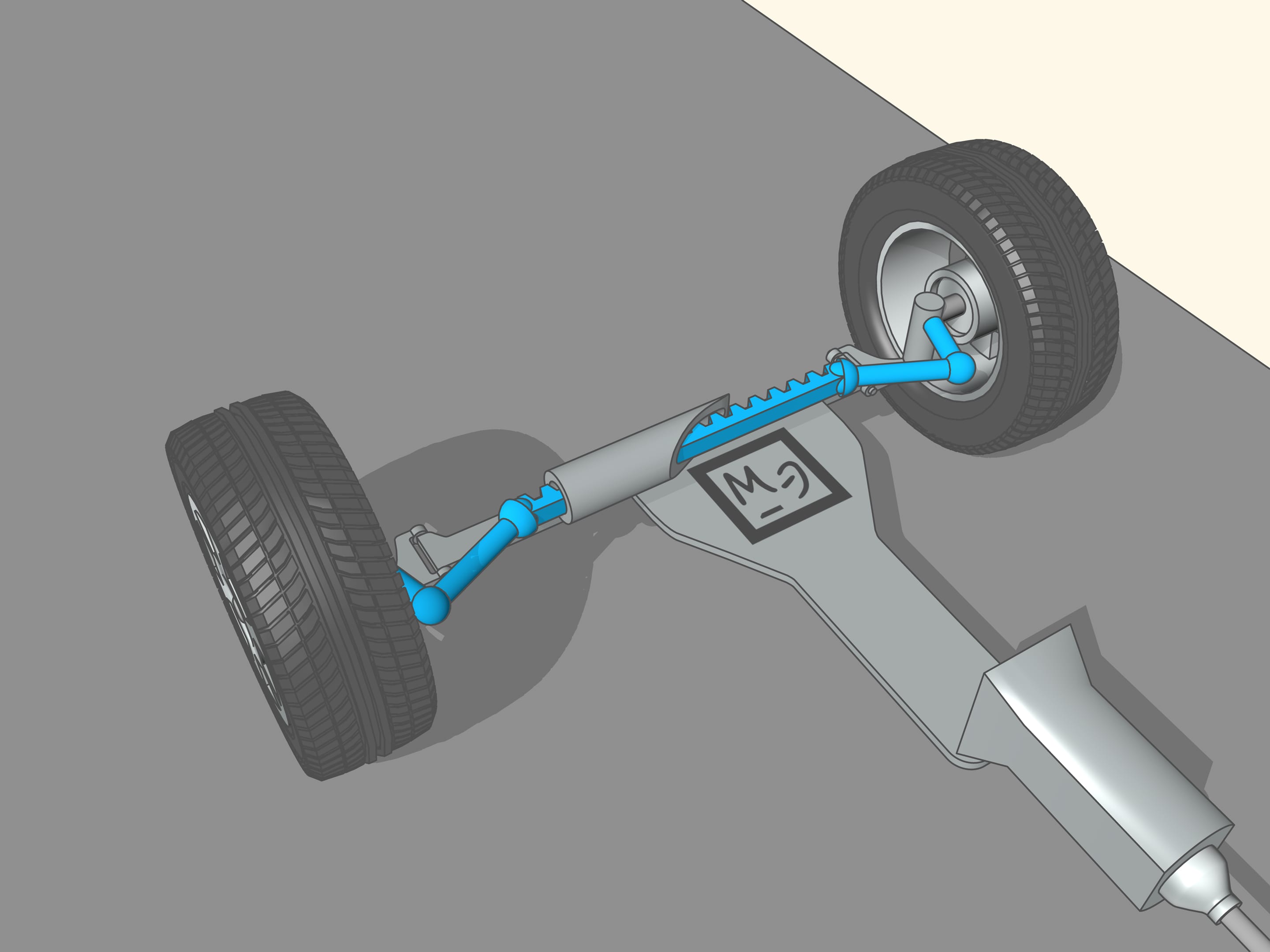
Dal tempo della realizzazione delle primi automobile la velocità di spostamento è cresciuta notevolmente. Crebbero così anche le esigenze di migliore controllo delle ruote anteriori. Inoltre, il trapezio è una figura geometrica piana. Questo metodo di controllo delle ruote anteriori si può usare solo con sospensioni anteriori non indipendenti, ossia quando le ruote sono collegate rigidamente tra loro e la retta che congiunge i loro centri è sempre parallela al piano del trapezio. Ora questo sistema si può trovare nei camion. Nelle automobili moderne le sospensioni delle ruote sono indipendenti, cioè possono muoversi in direzione verticale l’una rispetto all’altra. Per il controllo dello sterzo di queste ruote si usano dei meccanismi più complessi, non più planari, spesso con un elemento centrale a forma di cremagliera. Anche in questo caso è un problema per i matematici e gli ingegneri calcolarne i diversi elementi. Ma storicamente questi meccanismi continuano a chiamarsi i trapezi dello sterzo.
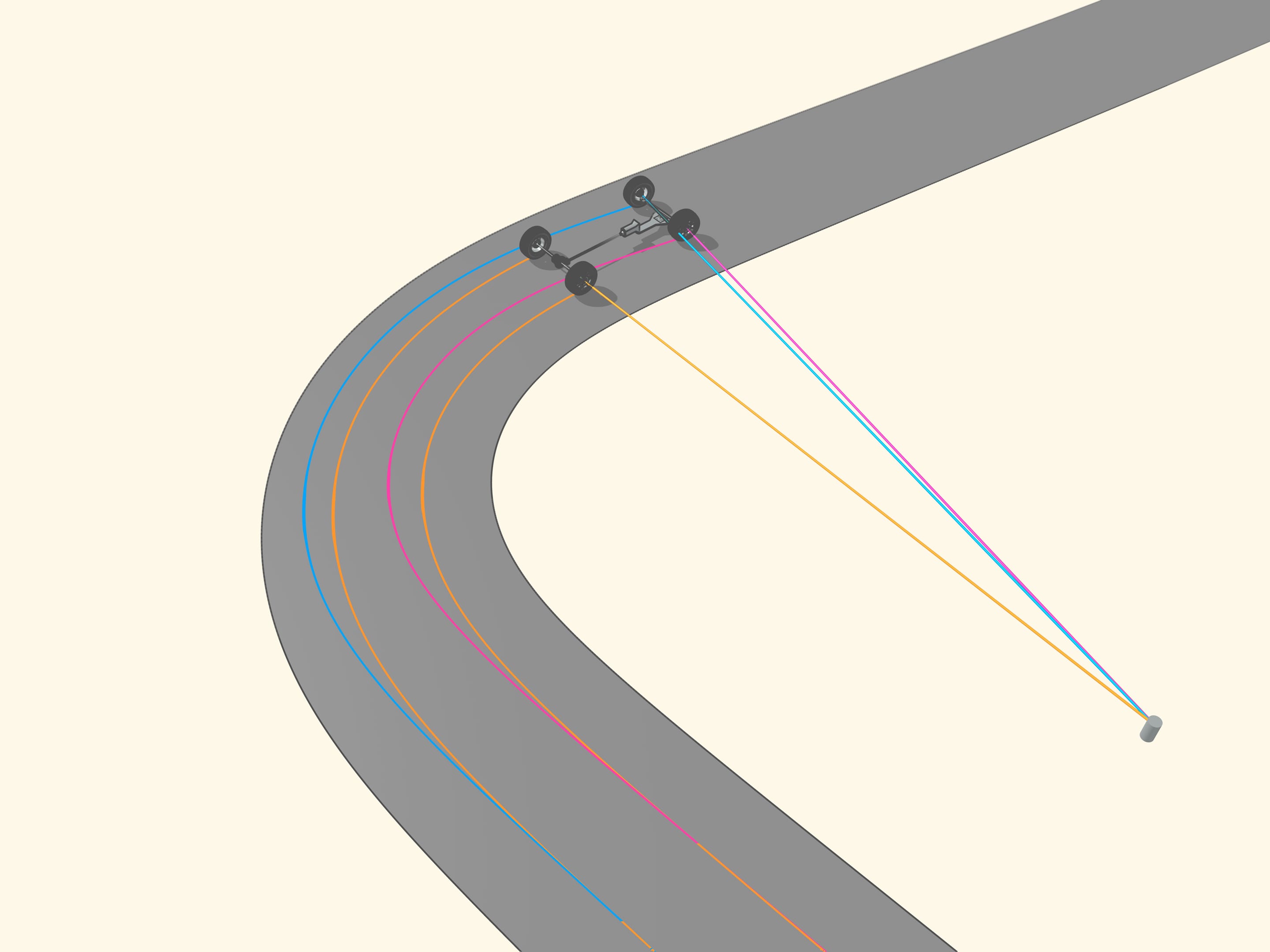
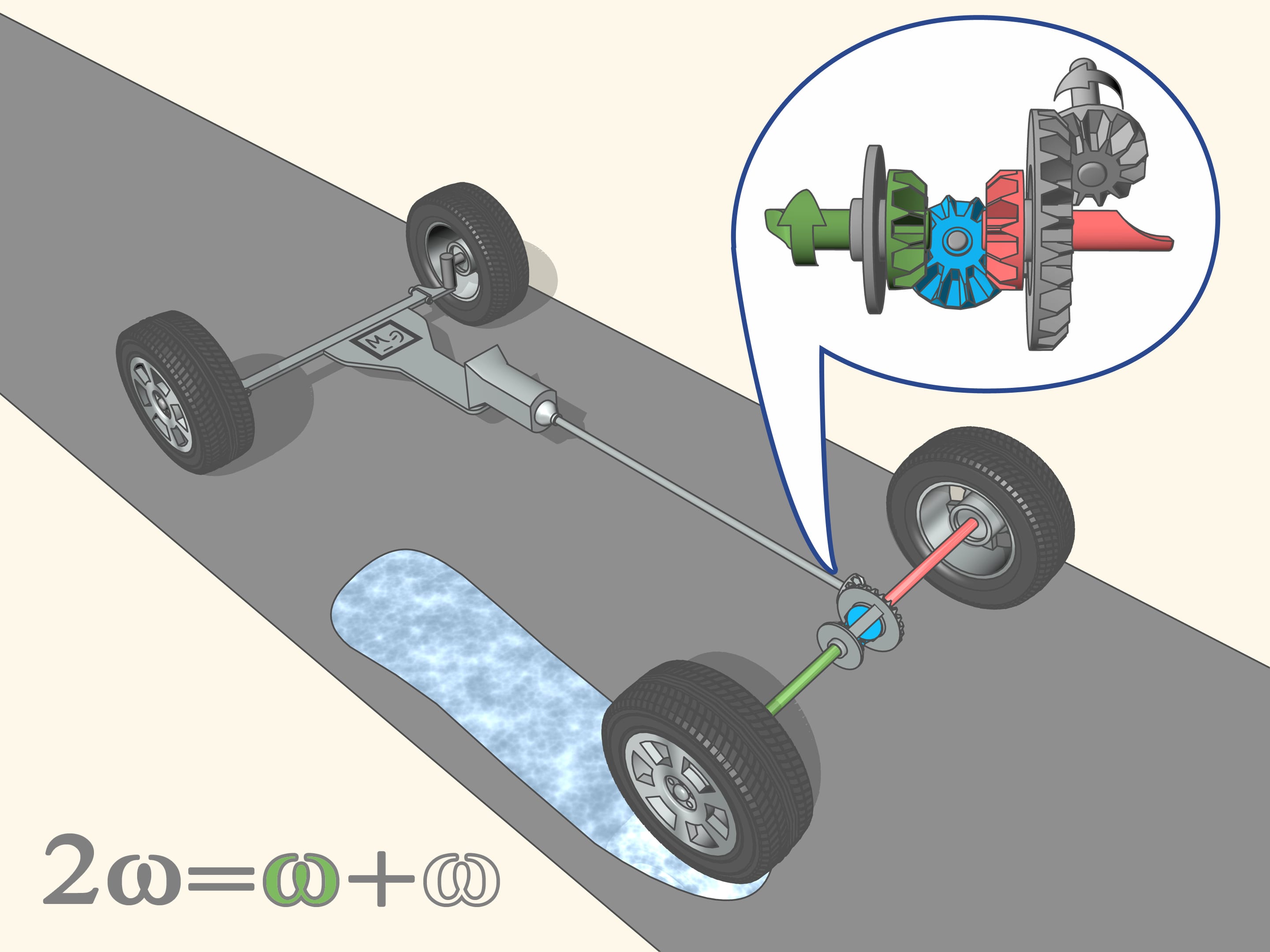
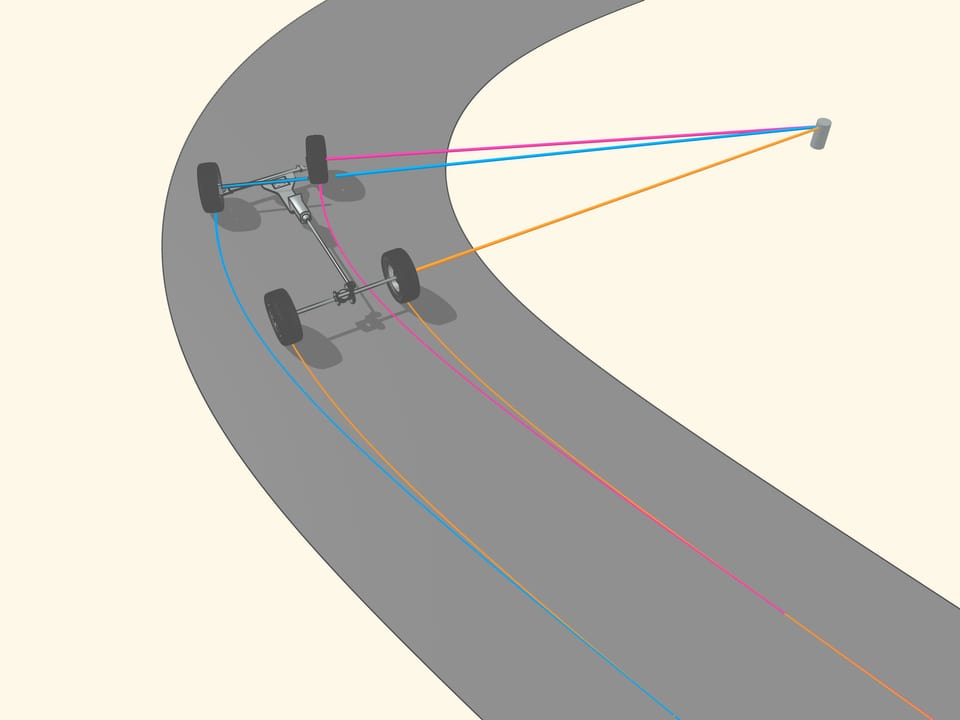
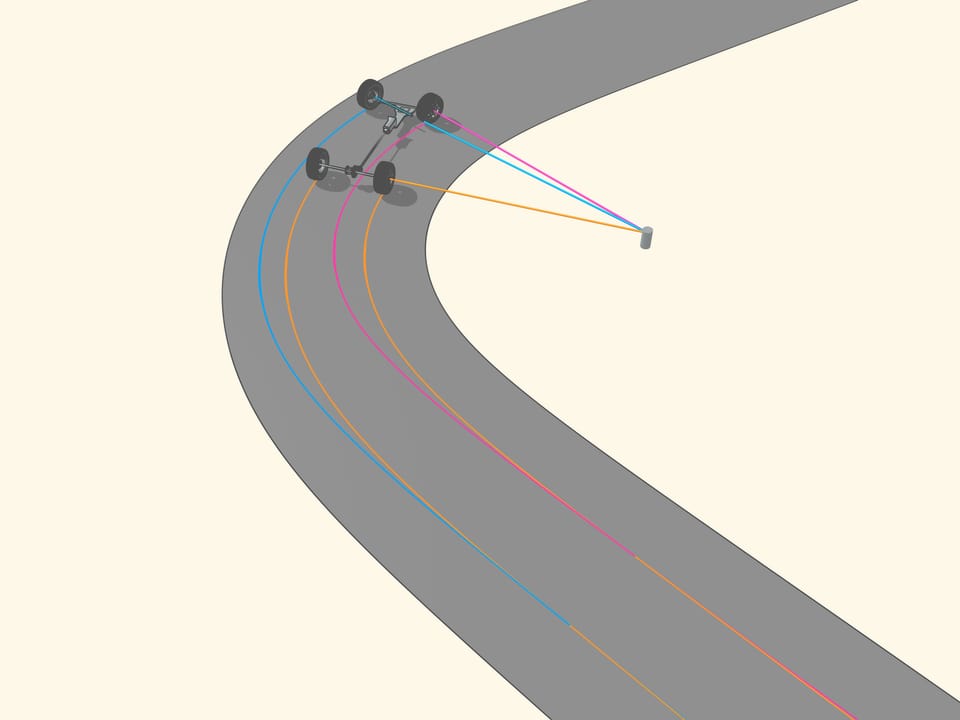
Riguardo allo sterzo delle automobili sorge ancora un’altra questione, legata alla geometria. La lunghezza di un cerchio di raggio R è uguale, come ricorderete, a 2πR, e la lunghezza di un arco di cerchio di ampiezza α e’ uguale a αR. Quando l’auto si muove lungo un arco di cerchio, la ruota anteriore esterna, più lontana dal centro di curvatura, si muove lungo un arco di raggio maggiore, rispetto a quella interna. Lo stesso avviene per le ruote posteriori: la ruota più esterna descrive un arco di lunghezza maggiore di quello della ruota più interna. E siccome i raggi sono diversi, così anche le lunghezze dei percorsi delle ruote aventi lo stesso asse devono essere diverse. Nel caso contrario una delle due ruote si troverebbe a slittare, cosa che diminuirebbe il controllo dell’auto.
Nel caso in cui l’asse delle ruote non è il principale, vale a dire, le ruote non sono quelle che fanno muovere l’auto – nel nostro caso quelle anteriori – è semplice: ogni ruota gira con la sua velocità necessaria per percorrere la curva desiderata senza scivolare.
Ma come fare, affinché le ruote dell’asse principale – nel nostro caso quello posteriore – da una parte muovano costantemente l’auto in avanti e dall’altra possano girare a velocità diverse?

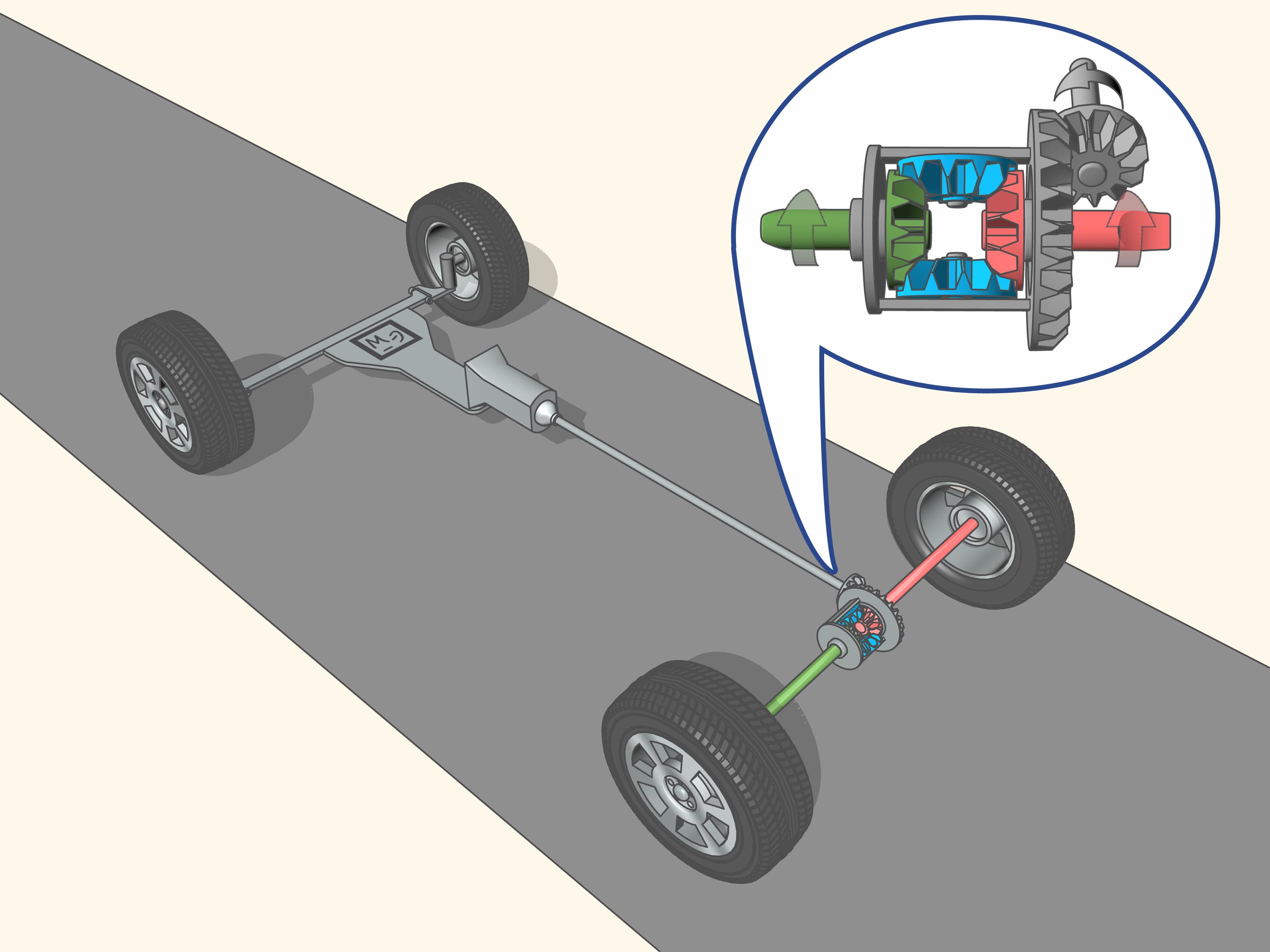
Per questo viene in aiuto il differenziale, un tipico ‘meccanismo planetario’. Viene chiamato planetario un meccanismo che ha dei meccanismi satelliti che girano intorno a degli assi che a loro volta ruotano.
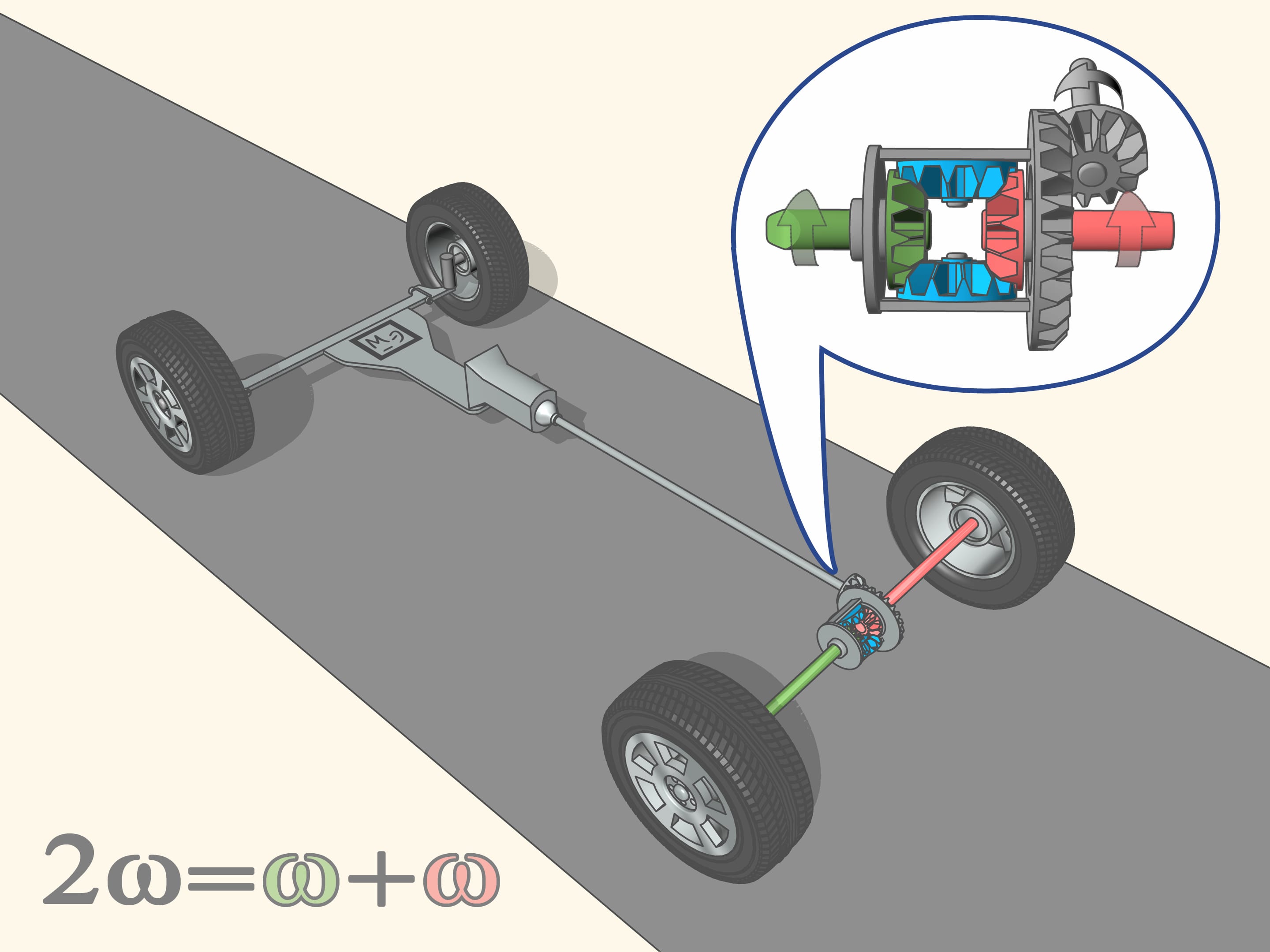
L’albero motore, attraverso la trasmissione, dà la rotazione all’asse primario, e precisamente, attraverso il meccanismo planetario, ai semiassi primari destro e sinistro. Qualunque siano le velocità a cui girano le ruote posteriori, la velocità del meccanismo sarà sempre uguale alla media delle velocità dei semiassi. Ogni ruota prende dal differenziale una quantità di rotazione, proporzionale alla lunghezza del suo percorso, sicché in totale tutta l’energia viene convertita nello spostamento in avanti dell’auto.
Se l’auto si muove su un tratto rettilineo, e sotto le ruote trainanti c’è lo stesso tipo di terreno, ossia con lo stesso coefficiente di attrito, le ruote prendono dal meccanismo la stessa quantità di rotazioni, e i semiassi girano (e le ruote insieme con essi) alla stessa velocità.
Ma se i coefficienti di attrito sono diversi, per esempio se da un lato l’auto passa sopra una macchia d’olio o su del ghiaccio, allora... Come si comporteranno le ruote se questo accade? Per le ruote non trainanti è tutto semplice, esse sono indipendenti l’una dall’altra, e non devono spingere la macchina, sicché se una di esse finisce sul ghiaccio, smette di girare, e il controllo diventa molto basso.
Ma ecco che anche la ruota trainante posteriore a sinistra finisce sul ghiaccio. A destra il controllo sull’asfalto è alto, e a sinistra, sul ghiaccio, è quasi assente. Di conseguenza, la ruota di sinistra gira molto più facilmente, ed incomincia a prendere dalla sua parte tutta la rotazione, che il meccanismo spartisce ai due semiassi. Poiché la somma delle velocità, come abbiamo detto, è costante, se un semiasse gira molto velocemente, l’altro non girerà affatto. Incominciare a muoversi in questa situazione, quando una delle ruote trainanti ha perso la presa col terreno (per esempio, si trova sul ghiaccio), mentre l’altra no, risulta impossibile.
Questo sembrerebbe dunque un difetto del differenziale. Gli ingegneri, infatti, cercano di migliorare il differenziale, conservandone la proprietà di base, che è quella del controllo ottimale nelle curve, e diminuendone gli effetti spiacevoli, come non permettere di girare a un asse quando la differenza delle velocità è elevata. Ma a giudicare, fino a oggi nulla è cambiato dato che le leggi della geometria sono sempre le stesse.
Altri etudi in “Matematica e tecnologia”